































ಅಬ್ದೆರಹ್ಮಾನ್ ರೆಜೆಬ್ a , ಅಲಿರೆಜಾ ಅಬ್ದುಲ್ಲಾಹಿ b , ಕರೀಮ್ ರೆಜೆಬ್ c , ಹೋರ್ಸ್ಟ್ ಟ್ರೀಬ್ಲ್ಮೇಯರ್ d,
- a ನಿರ್ವಹಣೆ ಮತ್ತು ಕಾನೂನು ವಿಭಾಗ, ಅರ್ಥಶಾಸ್ತ್ರ ವಿಭಾಗ, ರೋಮ್ ವಿಶ್ವವಿದ್ಯಾಲಯ ಟಾರ್ ವೆರ್ಗಾಟಾ, ಕೊಲಂಬಿಯಾ ಮೂಲಕ, 2, ರೋಮ್ 00133, ಇಟಲಿ
- b ವ್ಯವಹಾರ ಆಡಳಿತ ವಿಭಾಗ, ಮ್ಯಾನೇಜ್ಮೆಂಟ್ ವಿಭಾಗ, ಖರಾಜ್ಮಿ ವಿಶ್ವವಿದ್ಯಾಲಯ, 1599964511 ಟೆಹ್ರಾನ್, ಇರಾನ್
- c ಬಿಜೆರ್ಟೆಯ ವಿಜ್ಞಾನ ವಿಭಾಗ, ಕಾರ್ತೇಜ್ ವಿಶ್ವವಿದ್ಯಾನಿಲಯ, ಜರ್ಜೌನಾ, 7021 ಬಿಜೆರ್ಟೆ, ಟುನೀಶಿಯಾ
- d ಸ್ಕೂಲ್ ಆಫ್ ಇಂಟರ್ನ್ಯಾಶನಲ್ ಮ್ಯಾನೇಜ್ಮೆಂಟ್, ಮಾಡುಲ್ ಯೂನಿವರ್ಸಿಟಿ ವಿಯೆನ್ನಾ, ಆಮ್ ಕಹ್ಲೆನ್ಬರ್ಗ್ 1, 1190 ವಿಯೆನ್ನಾ, ಆಸ್ಟ್ರಿಯಾ
| ಲೇಖನ ಮಾಹಿತಿ | ಅಮೂರ್ತ |
| ಕೀವರ್ಡ್ಗಳನ್ನು: ಡ್ರೋನ್ಸ್ UAV ನಿಖರ ಕೃಷಿ ಥಿಂಗ್ಸ್ ಇಂಟರ್ನೆಟ್ ಗ್ರಂಥಮಾಪನಶಾಸ್ತ್ರ | ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು (UAV) ಎಂದೂ ಕರೆಯಲ್ಪಡುವ ಡ್ರೋನ್ಗಳು ಇತ್ತೀಚಿನ ದಶಕಗಳಲ್ಲಿ ಗಮನಾರ್ಹ ಬೆಳವಣಿಗೆಯನ್ನು ಕಂಡಿವೆ. ಕೃಷಿಯಲ್ಲಿ, ಅವರು ರೈತರಿಗೆ ಗಣನೀಯ ವೆಚ್ಚದ ಉಳಿತಾಯವನ್ನು ನೀಡುವ ಮೂಲಕ ಕೃಷಿ ಪದ್ಧತಿಗಳನ್ನು ಬದಲಾಯಿಸಿದ್ದಾರೆ ಕಾರ್ಯಾಚರಣೆಯ ದಕ್ಷತೆ ಮತ್ತು ಉತ್ತಮ ಲಾಭದಾಯಕತೆ. ಕಳೆದ ದಶಕಗಳಲ್ಲಿ, ಕೃಷಿ ಡ್ರೋನ್ಗಳ ವಿಷಯವಿದೆ ಗಮನಾರ್ಹ ಶೈಕ್ಷಣಿಕ ಗಮನ ಸೆಳೆಯಿತು. ಆದ್ದರಿಂದ ನಾವು ಗ್ರಂಥಮಾಪನಗಳ ಆಧಾರದ ಮೇಲೆ ಸಮಗ್ರ ವಿಮರ್ಶೆಯನ್ನು ನಡೆಸುತ್ತೇವೆ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಶೈಕ್ಷಣಿಕ ಸಾಹಿತ್ಯವನ್ನು ಸಂಕ್ಷಿಪ್ತಗೊಳಿಸಲು ಮತ್ತು ರಚನೆ ಮಾಡಲು ಮತ್ತು ಪ್ರಸ್ತುತ ಸಂಶೋಧನಾ ಪ್ರವೃತ್ತಿಗಳು ಮತ್ತು ಹಾಟ್ಸ್ಪಾಟ್ಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು. ನಾವು ಬಿಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ತಂತ್ರಗಳನ್ನು ಅನ್ವಯಿಸಿ ಮತ್ತು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಸುತ್ತಲಿನ ಸಾಹಿತ್ಯವನ್ನು ಸಂಕ್ಷಿಪ್ತವಾಗಿ ವಿಶ್ಲೇಷಿಸಿ ಮತ್ತು ಹಿಂದಿನ ಸಂಶೋಧನೆಯನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಿ. ನಮ್ಮ ವಿಶ್ಲೇಷಣೆಯು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್, ನಿಖರವಾದ ಕೃಷಿ, ಆಳವಾದ ಕಲಿಕೆ, ಯಂತ್ರ ಕಲಿಕೆ ಮತ್ತು ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ ಕೃಷಿ ಡ್ರೋನ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ನಿರ್ಣಾಯಕ ವಿಷಯಗಳಾಗಿವೆ ಎಂದು ಸೂಚಿಸುತ್ತದೆ. ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯು ಸಾಹಿತ್ಯದಲ್ಲಿ ಆರು ವಿಶಾಲ ಸಂಶೋಧನಾ ಸಮೂಹಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. ಈ ಅಧ್ಯಯನವು ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಸಂಶೋಧನೆಯ ಸಾರಾಂಶ ಮತ್ತು ಭವಿಷ್ಯದ ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳನ್ನು ಸೂಚಿಸುವ ಮೊದಲ ಪ್ರಯತ್ನಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ. |
ಪರಿಚಯ
ಕೃಷಿಯು ಪ್ರಪಂಚದ ಪ್ರಾಥಮಿಕ ಆಹಾರ ಮೂಲವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ (ಫ್ರಿಹಾ ಮತ್ತು ಇತರರು, 2021), ಮತ್ತು ಇದು ತೀವ್ರ ಸವಾಲುಗಳನ್ನು ಎದುರಿಸುತ್ತಿದೆ
ಆಹಾರ ಉತ್ಪನ್ನಗಳಿಗೆ ಹೆಚ್ಚುತ್ತಿರುವ ಬೇಡಿಕೆ, ಆಹಾರ ಸುರಕ್ಷತೆ ಮತ್ತು ಭದ್ರತಾ ಕಾಳಜಿಗಳು ಹಾಗೂ ಪರಿಸರ ಸಂರಕ್ಷಣೆ, ನೀರಿನ ಸಂರಕ್ಷಣೆ ಮತ್ತು
ಸಮರ್ಥನೀಯತೆ (ಇನೌ, 2020). 9.7 ರ ವೇಳೆಗೆ ವಿಶ್ವ ಜನಸಂಖ್ಯೆಯು 2050 ಶತಕೋಟಿಗೆ ತಲುಪುತ್ತದೆ ಎಂದು ಅಂದಾಜಿಸಲಾಗಿರುವುದರಿಂದ ಈ ಬೆಳವಣಿಗೆಯು ಮುಂದುವರಿಯುತ್ತದೆ ಎಂದು ಊಹಿಸಲಾಗಿದೆ
(2019) ಜಾಗತಿಕವಾಗಿ ನೀರಿನ ಬಳಕೆಗೆ ಕೃಷಿಯು ಪ್ರಮುಖ ಉದಾಹರಣೆಯಾಗಿರುವುದರಿಂದ, ಆಹಾರದ ಬೇಡಿಕೆ ಮತ್ತು ನೀರು ಎಂದು ನಿರೀಕ್ಷಿಸಲಾಗಿದೆ
ನಿರೀಕ್ಷಿತ ಭವಿಷ್ಯದಲ್ಲಿ ಬಳಕೆ ನಾಟಕೀಯವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆ. ಇದಲ್ಲದೆ, ರಸಗೊಬ್ಬರಗಳು ಮತ್ತು ಕೀಟನಾಶಕಗಳ ಬಳಕೆ ಹೆಚ್ಚುತ್ತಿದೆ
ಕೃಷಿ ಚಟುವಟಿಕೆಗಳ ತೀವ್ರತೆಯ ಜೊತೆಗೆ ಭವಿಷ್ಯದ ಪರಿಸರ ಸವಾಲುಗಳಿಗೆ ಕಾರಣವಾಗಬಹುದು. ಅಂತೆಯೇ, ಕೃಷಿಯೋಗ್ಯ ಭೂಮಿ ಸೀಮಿತವಾಗಿದೆ, ಮತ್ತು
ಪ್ರಪಂಚದಾದ್ಯಂತ ರೈತರ ಸಂಖ್ಯೆ ಕಡಿಮೆಯಾಗುತ್ತಿದೆ. ಈ ಸವಾಲುಗಳು ನವೀನ ಮತ್ತು ಸುಸ್ಥಿರ ಕೃಷಿ ಪರಿಹಾರಗಳ ಅಗತ್ಯವನ್ನು ಒತ್ತಿಹೇಳುತ್ತವೆ (ಎಲಿಜಾ
ಮತ್ತು ಇತರರು, 2018; ಫ್ರಿಹಾ ಮತ್ತು ಇತರರು, 2021; ಇನೌ, 2020; ಟ್ಜೌನಿಸ್ ಮತ್ತು ಇತರರು, 2017).
ಈ ಸವಾಲುಗಳನ್ನು ಎದುರಿಸಲು ನವೀನ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುವುದು ಒಂದು ಭರವಸೆಯ ಪರಿಹಾರವೆಂದು ಗುರುತಿಸಲಾಗಿದೆ. ಸ್ಮಾರ್ಟ್ ಕೃಷಿ (ಬ್ರೂಸ್ಟರ್ ಮತ್ತು ಇತರರು,
2017; ಟ್ಯಾಂಗ್ ಮತ್ತು ಇತರರು, 2021) ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿ (ಫೆಂಗ್ ಮತ್ತು ಇತರರು, 2019; ಖನ್ನಾ & ಕೌರ್, 2019) ಇಂತಹ ಚರ್ಚೆಗಳ ಪರಿಣಾಮವಾಗಿ ಹೊರಹೊಮ್ಮಿವೆ. ದಿ
ಮೊದಲನೆಯದು ದಕ್ಷತೆ ಮತ್ತು ಪರಿಣಾಮಕಾರಿತ್ವವನ್ನು ಹೆಚ್ಚಿಸಲು ಮಾಹಿತಿ ಸಂವಹನ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು (ICT) ಮತ್ತು ಕೃಷಿ ಚಟುವಟಿಕೆಗಳಲ್ಲಿ ಇತರ ಅತ್ಯಾಧುನಿಕ ಆವಿಷ್ಕಾರಗಳನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುವ ಸಾಮಾನ್ಯ ಪರಿಕಲ್ಪನೆಯಾಗಿದೆ (Haque et al., 2021). ಎರಡನೆಯದು ಸೈಟ್-ನಿರ್ದಿಷ್ಟ ನಿರ್ವಹಣೆಯ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸುತ್ತದೆ, ಇದರಲ್ಲಿ ಭೂಮಿಯನ್ನು ವಿಂಗಡಿಸಲಾಗಿದೆ
ಏಕರೂಪದ ಭಾಗಗಳು, ಮತ್ತು ಪ್ರತಿ ಭಾಗವು ನವೀನ ತಂತ್ರಜ್ಞಾನಗಳ ಮೂಲಕ ಬೆಳೆ ಇಳುವರಿ ಆಪ್ಟಿಮೈಸೇಶನ್ಗಾಗಿ ನಿಖರವಾದ ಕೃಷಿ ಇನ್ಪುಟ್ ಅನ್ನು ಪಡೆಯುತ್ತದೆ (ಫೆಂಗ್ ಮತ್ತು ಇತರರು, 2019; ಖನ್ನಾ ಮತ್ತು ಕೌರ್, 2019). ಈ ಕ್ಷೇತ್ರದಲ್ಲಿ ವಿದ್ವಾಂಸರ ಗಮನವನ್ನು ಸೆಳೆದಿರುವ ಪ್ರಮುಖ ತಂತ್ರಜ್ಞಾನಗಳೆಂದರೆ ವೈರ್ಲೆಸ್ ಸೆನ್ಸರ್ ನೆಟ್ವರ್ಕ್ಗಳು (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), The Internet of Things (IoT) (ಗಿಲ್ ಮತ್ತು ಇತರರು., 2017; ಅವರು ಮತ್ತು ಇತರರು, 2021; ಲಿಯು ಮತ್ತು ಇತರರು, 2019),
ಯಂತ್ರ ಕಲಿಕೆ ಮತ್ತು ಆಳವಾದ ಕಲಿಕೆ ಸೇರಿದಂತೆ ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆ (AI) ತಂತ್ರಗಳು (ಲಿಯಾಕೋಸ್ ಮತ್ತು ಇತರರು, 2018; ಪಾರ್ಸೆಯನ್ ಮತ್ತು ಇತರರು, 2020; ಶಾದ್ರಿನ್ ಮತ್ತು ಇತರರು.,
2019), ಕಂಪ್ಯೂಟಿಂಗ್ ತಂತ್ರಜ್ಞಾನಗಳು (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), ದೊಡ್ಡ ಡೇಟಾ (ಗಿಲ್ et al., 2017; Tantalaki
et al., 2019), ಮತ್ತು blockchain (PW ಖಾನ್ ಮತ್ತು ಇತರರು, 2020; Pincheira et al., 2021).
ಮೇಲೆ ತಿಳಿಸಲಾದ ತಂತ್ರಜ್ಞಾನಗಳ ಜೊತೆಗೆ, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಅನ್ನು ಸುಧಾರಿಸಲು ಹೆಚ್ಚಿನ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರುವ ತಾಂತ್ರಿಕ ಸಾಧನವೆಂದು ಪರಿಗಣಿಸಲಾಗಿದೆ.
ಸ್ಮಾರ್ಟ್ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿ. ಉಪಗ್ರಹಗಳು, ಮಾನವ ಸಿಬ್ಬಂದಿಯ ವಿಮಾನಗಳು ಮತ್ತು ಡ್ರೋನ್ಗಳು ಜನಪ್ರಿಯ ದೂರಸಂವೇದಿ ತಂತ್ರಜ್ಞಾನಗಳಾಗಿವೆ (Tsouros et al., 2019).
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು (UAVಗಳು), ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಗಳು (UAS), ಮತ್ತು ದೂರದಿಂದಲೇ ಪೈಲಟ್ ಮಾಡಲಾದ ವಿಮಾನಗಳು ಎಂದು ಜನಪ್ರಿಯವಾಗಿ ಕರೆಯಲ್ಪಡುವ ಡ್ರೋನ್ಗಳು
ಇತರ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಜ್ಞಾನಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಅವುಗಳು ಬಹು ಪ್ರಯೋಜನಗಳನ್ನು ಹೊಂದಿರುವುದರಿಂದ ಹೆಚ್ಚಿನ ಪ್ರಾಮುಖ್ಯತೆಯನ್ನು ಹೊಂದಿದೆ. ಉದಾಹರಣೆಗೆ, ಡ್ರೋನ್ಗಳು ತಲುಪಿಸಬಹುದು
ಮೋಡ ಕವಿದ ದಿನಗಳಲ್ಲಿ ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಮತ್ತು ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಗಳು (ಮ್ಯಾನ್ಫ್ರೆಡಾ ಮತ್ತು ಇತರರು, 2018). ಅಲ್ಲದೆ, ಅವುಗಳ ಲಭ್ಯತೆ ಮತ್ತು ವರ್ಗಾವಣೆ ವೇಗವು ಇತರರನ್ನು ರೂಪಿಸುತ್ತದೆ
ಪ್ರಯೋಜನಗಳು (ರಾಡೋಗ್ಲೋ-ಗ್ರಾಮಟಿಕಿಸ್ ಮತ್ತು ಇತರರು, 2020). ವಿಮಾನದೊಂದಿಗೆ ಹೋಲಿಸಿದರೆ, ಡ್ರೋನ್ಗಳು ಹೆಚ್ಚು ವೆಚ್ಚ-ಪರಿಣಾಮಕಾರಿ ಮತ್ತು ಹೊಂದಿಸಲು ಮತ್ತು ನಿರ್ವಹಿಸಲು ಸುಲಭವಾಗಿದೆ (Tsouros et al., 2019). ಆರಂಭದಲ್ಲಿ ಮುಖ್ಯವಾಗಿ ಮಿಲಿಟರಿ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಬಳಸಲಾಗಿದ್ದರೂ, ಡ್ರೋನ್ಗಳು ಹಲವಾರು ನಾಗರಿಕ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ಪ್ರಯೋಜನವನ್ನು ನೀಡುತ್ತವೆ, ಉದಾಹರಣೆಗೆ ಪೂರೈಕೆ ಸರಪಳಿ ನಿರ್ವಹಣೆಯಲ್ಲಿ (ಎ. ರೆಜೆಬ್, ರೆಜೆಬ್, ಮತ್ತು ಇತರರು, 2021 ಎ), ಮಾನವೀಯ ಉದ್ದೇಶಗಳಿಗಾಗಿ (ಎ. ರೆಜೆಬ್, ರೆಜೆಬ್, ಮತ್ತು ಇತರರು., 2021c), ಸ್ಮಾರ್ಟ್ ಕೃಷಿ, ಸಮೀಕ್ಷೆ ಮತ್ತು ಮ್ಯಾಪಿಂಗ್, ಸಾಂಸ್ಕೃತಿಕ ಪರಂಪರೆ ದಾಖಲಾತಿ, ವಿಪತ್ತು ನಿರ್ವಹಣೆ ಮತ್ತು ಅರಣ್ಯ ಮತ್ತು ವನ್ಯಜೀವಿ ಸಂರಕ್ಷಣೆ (ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ತ್, ಮತ್ತು ಇತರರು, 2020). ಕೃಷಿಯಲ್ಲಿ, ಡ್ರೋನ್ಗಳ ಮ್ಯಾನಿಫೋಲ್ಡ್ ಅಪ್ಲಿಕೇಶನ್ ಪ್ರದೇಶಗಳು ಅಸ್ತಿತ್ವದಲ್ಲಿವೆ ಏಕೆಂದರೆ ಅವುಗಳು ಬೆಳೆ ನಿರ್ವಹಣೆಯನ್ನು ಬೆಂಬಲಿಸಲು ನವೀನ ತಂತ್ರಜ್ಞಾನಗಳು, ಕಂಪ್ಯೂಟಿಂಗ್ ಸಾಮರ್ಥ್ಯಗಳು ಮತ್ತು ಆನ್ಬೋರ್ಡ್ ಸಂವೇದಕಗಳೊಂದಿಗೆ ಸಂಯೋಜಿಸಬಹುದು (ಉದಾ, ಮ್ಯಾಪಿಂಗ್, ಮೇಲ್ವಿಚಾರಣೆ, ನೀರಾವರಿ, ಸಸ್ಯ ರೋಗನಿರ್ಣಯ) (H. ಹುವಾಂಗ್ ಮತ್ತು ಇತರರು, 2021) , ವಿಪತ್ತು ಕಡಿತ, ಮುಂಚಿನ ಎಚ್ಚರಿಕೆ ವ್ಯವಸ್ಥೆಗಳು, ವನ್ಯಜೀವಿ ಮತ್ತು ಅರಣ್ಯ ಸಂರಕ್ಷಣೆ ಕೆಲವು ಹೆಸರಿಸಲು (ನೆಗಾಶ್ ಮತ್ತು ಇತರರು, 2019). ಅಂತೆಯೇ, ಬೆಳೆ ಮತ್ತು ಬೆಳವಣಿಗೆಯ ಮೇಲ್ವಿಚಾರಣೆ, ಇಳುವರಿ ಅಂದಾಜು, ನೀರಿನ ಒತ್ತಡದ ಮೌಲ್ಯಮಾಪನ, ಮತ್ತು ಕಳೆಗಳು, ಕೀಟಗಳು ಮತ್ತು ರೋಗ ಪತ್ತೆ (ಇನೌ, 2020; ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ಟ್, ಮತ್ತು ಇತರರು, 2020) ಸೇರಿದಂತೆ ಹಲವಾರು ಕೃಷಿ ಚಟುವಟಿಕೆಗಳಲ್ಲಿ ಡ್ರೋನ್ಗಳನ್ನು ಬಳಸಿಕೊಳ್ಳಬಹುದು. ಡ್ರೋನ್ಗಳನ್ನು ಅವುಗಳ ಸಂವೇದನಾ ದತ್ತಾಂಶದ ಆಧಾರದ ಮೇಲೆ ಮೇಲ್ವಿಚಾರಣೆ, ಅಂದಾಜು ಮತ್ತು ಪತ್ತೆ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಮಾತ್ರ ಬಳಸಲಾಗುವುದಿಲ್ಲ, ಆದರೆ ನಿಖರವಾದ ನೀರಾವರಿ ಮತ್ತು ನಿಖರವಾದ ಕಳೆ, ಕೀಟ ಮತ್ತು ರೋಗ ನಿರ್ವಹಣೆಗೆ ಸಹ ಬಳಸಬಹುದು. ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಹೇಳುವುದಾದರೆ, ಡ್ರೋನ್ಗಳು ಪರಿಸರ ದತ್ತಾಂಶದ ಆಧಾರದ ಮೇಲೆ ನಿಖರವಾದ ಪ್ರಮಾಣದಲ್ಲಿ ನೀರು ಮತ್ತು ಕೀಟನಾಶಕಗಳನ್ನು ಸಿಂಪಡಿಸಲು ಸಮರ್ಥವಾಗಿವೆ. ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಪ್ರಯೋಜನಗಳನ್ನು ಕೋಷ್ಟಕ 1 ರಲ್ಲಿ ಸಂಕ್ಷೇಪಿಸಲಾಗಿದೆ.
ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಮುಖ್ಯ ಪ್ರಯೋಜನಗಳು.
| ಲಾಭ | ಉಲ್ಲೇಖಗಳು) |
| ತಾತ್ಕಾಲಿಕ ಮತ್ತು ಪ್ರಾದೇಶಿಕತೆಯನ್ನು ಹೆಚ್ಚಿಸಿ ಸಂವೇದನಾ ನಿರ್ಣಯಗಳು | (ಗಾಗೋ ಮತ್ತು ಇತರರು, 2015; ನಿಯು ಮತ್ತು ಇತರರು, 2020; ಶ್ರೀವಾಸ್ತವ ಇತರರು, 2020) |
| ನಿಖರವಾದ ಕೃಷಿಗೆ ಅನುಕೂಲ | (L. ಡೆಂಗ್ ಮತ್ತು ಇತರರು, 2018; ಕಲಿಸ್ಚುಕ್ ಮತ್ತು ಇತರರು, 2019; ಮೈಮೈತಿಜಿಯಾಂಗ್ ಮತ್ತು ಇತರರು, 2017) |
| ವರ್ಗೀಕರಣ ಮತ್ತು ಸ್ಕೌಟಿಂಗ್ ಬೆಳೆಗಳು | (ಇನೌ, 2020; ಕಲಿಸ್ಚುಕ್ ಮತ್ತು ಇತರರು, 2019; ಲೋಪೆಜ್-' ಗ್ರಾನಡೋಸ್ ಮತ್ತು ಇತರರು, 2016; ಮೈಮೈತಿಜಿಯಾಂಗ್ ಮತ್ತು ಇತರರು, 2017; ಮೆಲ್ವಿಲ್ಲೆ ಮತ್ತು ಇತರರು, 2019; ಮೊಹರಾನಾ ಮತ್ತು ದತ್ತಾ, 2016) |
| ಗೊಬ್ಬರದ ಬಳಕೆ | (ಎಲ್. ಡೆಂಗ್ ಮತ್ತು ಇತರರು, 2018; ಗುವಾನ್ ಮತ್ತು ಇತರರು, 2019) |
| ಬರಗಾಲದ ಮೇಲ್ವಿಚಾರಣೆ | (ಫಾಸೆಟ್ ಮತ್ತು ಇತರರು, 2020; ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ತ್, ಮತ್ತು ಇತರರು, 2020; ಸು ಮತ್ತು ಇತರರು, 2018) |
| ಜೀವರಾಶಿ ಅಂದಾಜು | (ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು, 2014) |
| ಇಳುವರಿ ಅಂದಾಜು | (ಇನೌ, 2020; ಪಾಂಡೆ, ಶ್ರೇಷ್ಠ, ಮತ್ತು ಇತರರು, 2020; ಟಾವೊ ಇತರರು, 2020) |
| ವಿಪತ್ತು ಕಡಿತ | (ನೆಗಾಶ್ ಮತ್ತು ಇತರರು, 2019) |
| ವನ್ಯಜೀವಿಗಳ ಸಂರಕ್ಷಣೆ ಮತ್ತು ಅರಣ್ಯ | (ನೆಗಾಶ್ ಮತ್ತು ಇತರರು, 2019; ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ತ್, ಮತ್ತು ಇತರರು., 2020) |
| ನೀರಿನ ಒತ್ತಡದ ಮೌಲ್ಯಮಾಪನ | (ಇನೌ, 2020; ಜೆ. ಸು, ಕೂಂಬೆಸ್, ಮತ್ತು ಇತರರು, 2018; ಎಲ್. ಜಾಂಗ್ ಮತ್ತು ಇತರರು, 2019) |
| ಕೀಟಗಳು, ಕಳೆಗಳು ಮತ್ತು ರೋಗಗಳು ಪತ್ತೆ | (ಗ್ಯಾಸ್ಪರೋವಿಕ್ ಮತ್ತು ಇತರರು, 2020; ಇನೌ, 2020; ಜೆ. ಸು, ಲಿಯು, ಮತ್ತು ಇತರರು, 2018; X. ಜಾಂಗ್ ಮತ್ತು ಇತರರು, 2019) |
ಮತ್ತೊಂದೆಡೆ, ಡ್ರೋನ್ಗಳು ಮಿತಿಗಳನ್ನು ಎದುರಿಸುತ್ತವೆ. ಪೈಲಟ್ ಒಳಗೊಳ್ಳುವಿಕೆ, ಎಂಜಿನ್ ಶಕ್ತಿ, ಸ್ಥಿರತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆ, ಪೇಲೋಡ್ ಕಾರಣ ಸಂವೇದಕಗಳ ಗುಣಮಟ್ಟ
ತೂಕದ ಮಿತಿಗಳು, ಅನುಷ್ಠಾನ ವೆಚ್ಚಗಳು ಮತ್ತು ವಾಯುಯಾನ ನಿಯಂತ್ರಣ, ಅವುಗಳಲ್ಲಿ ಸೇರಿವೆ (C. ಜಾಂಗ್ & ಕೊವಾಕ್ಸ್, 2012). ನಾವು ನ್ಯೂನತೆಗಳನ್ನು ಹೋಲಿಸುತ್ತೇವೆ
ಕೋಷ್ಟಕ 2 ರಲ್ಲಿನ ಮೂರು ಮೊಬೈಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಜ್ಞಾನಗಳು. ಮಣ್ಣಿನ ಸಂವೇದಕಗಳಂತಹ ಇತರ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಜ್ಞಾನಗಳು ಈ ಅಧ್ಯಯನದ ಗಮನವನ್ನು ಮೀರಿವೆ.
ವಿವಿಧ ಮೊಬೈಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಜ್ಞಾನಗಳ ನ್ಯೂನತೆಗಳು.
| ದೂರ ಸಂವೇದಿ ತಂತ್ರಜ್ಞಾನಗಳು | ನ್ಯೂನತೆಗಳು | ಉಲ್ಲೇಖಗಳು |
| ಡ್ರೋನ್ (UAV) | ಪೈಲಟ್ ಒಳಗೊಳ್ಳುವಿಕೆ; ಚಿತ್ರಗಳು' ಗುಣಮಟ್ಟ (ಸರಾಸರಿ); ಅನುಷ್ಠಾನ ವೆಚ್ಚಗಳು (ಸರಾಸರಿ); ಸ್ಥಿರತೆ, ಕುಶಲತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆ; ಪ್ರಮಾಣೀಕರಣ; ಎಂಜಿನ್ ಶಕ್ತಿ; ಸೀಮಿತ ಶಕ್ತಿ ಮೂಲಗಳು (ಬ್ಯಾಟರಿ ದೀರ್ಘಾಯುಷ್ಯ); ಸೀಮಿತ ಹಾರಾಟದ ಅವಧಿ, ಘರ್ಷಣೆ ಮತ್ತು ಸೈಬರ್ ದಾಳಿಗಳು; ಸೀಮಿತ ಪೇಲೋಡ್ ತೂಕ; ದೊಡ್ಡ ಡೇಟಾಸೆಟ್ಗಳು ಮತ್ತು ಸೀಮಿತ ಡೇಟಾ ಸಂಸ್ಕರಣೆ ಸಾಮರ್ಥ್ಯಗಳು; ನಿಯಂತ್ರಣದ ಕೊರತೆ; ಪರಿಣಿತಿಯ ಕೊರತೆ, ಹೆಚ್ಚಿನ ಪ್ರವೇಶ ಪ್ರವೇಶಕ್ಕೆ ಅಡೆತಡೆಗಳು ಕೃಷಿ ಡ್ರೋನ್ಗಳು; | (ಬ್ಯಾಕೊ ಮತ್ತು ಇತರರು, 2018; ದಾವಾಲಿಬಿ ಮತ್ತು ಇತರರು, 2020; ಹಾರ್ಡಿನ್ & ಹಾರ್ಡಿನ್, 2010; ಹಾರ್ಡಿನ್ & ಜೆನ್ಸನ್, 2011; ಲಗ್ಕಾಸ್ ಮತ್ತು ಇತರರು., 2018; ಲಾಲಿಬರ್ಟೆ ಮತ್ತು ಇತರರು, 2007; ಲಾಲಿಬರ್ಟೆ & ರಂಗೋ, 2011; ಮ್ಯಾನ್ಫ್ರೆಡಾ ಮತ್ತು ಇತರರು, 2018, 2018; ನೆಬಿಕರ್ ಮತ್ತು ಇತರರು, 2008; ಪುರಿ ಮತ್ತು ಇತರರು, 2017; ವೇಲುಸಾಮಿ ಮತ್ತು ಇತರರು. 2022; C. ಜಾಂಗ್ ಮತ್ತು ಕೊವಾಕ್ಸ್, 2012) |
| ಉಪಗ್ರಹ | ಆವರ್ತಕ ಉಪಗ್ರಹ ವ್ಯಾಪ್ತಿ, ಸೀಮಿತ ರೋಹಿತದ ರೆಸಲ್ಯೂಶನ್; ಗೋಚರತೆಯ ಸಮಸ್ಯೆಗಳಿಗೆ ದುರ್ಬಲತೆ (ಉದಾ, ಮೋಡಗಳು); ಅಲಭ್ಯತೆ ಮತ್ತು ಕಡಿಮೆ ವರ್ಗಾವಣೆ ವೇಗ; ದೃಷ್ಟಿಕೋನ ಮತ್ತು ವಿಗ್ನೆಟಿಂಗ್ ವೆಚ್ಚದ ಪ್ರಾದೇಶಿಕ ಡೇಟಾದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ ಸಂಗ್ರಹಣೆ; ನಿಧಾನ ಡೇಟಾ ವಿತರಣೆ ಅಂತಿಮ ಬಳಕೆದಾರರಿಗೆ ಸಮಯ | (ಅಬೌಟಲೇಬಿ ಮತ್ತು ಇತರರು, 2019; ಸೆಂ ಮತ್ತು ಇತರರು, 2019; ಚೆನ್ ಮತ್ತು ಇತರರು., 2019; ನಾನ್ಸೆನ್ ಮತ್ತು ಎಲಿಯಟ್, 2016; ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ತ, ಮತ್ತು ಇತರರು, 2020; ಸಾಯಿ ವಿನೀತ್ ಇತರರು, 2019) |
| ವಿಮಾನ | ಹೆಚ್ಚಿನ ದತ್ತು ವೆಚ್ಚಗಳು; ಸಂಕೀರ್ಣ ಸೆಟಪ್; ನಿರ್ವಹಣೆ ವೆಚ್ಚಗಳು; ವಿಶ್ವಾಸಾರ್ಹತೆಯ ಅಲಭ್ಯತೆ ವಿಮಾನಗಳು, ಜ್ಯಾಮಿತಿ ಚಿತ್ರಗಳು; ನಿಯಮಿತವಲ್ಲದ ಡೇಟಾ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಳ್ಳುವಿಕೆ; ನಮ್ಯತೆ ಕೊರತೆ; ಮಾರಣಾಂತಿಕ ಅಪಘಾತಗಳು; ಸಂವೇದಕ ಡೇಟಾ ಕಂಪನಗಳ ಕಾರಣದಿಂದಾಗಿ ವ್ಯತ್ಯಾಸಗಳು; ಜಿಯೋರೆಫರೆನ್ಸಿಂಗ್ ಸಮಸ್ಯೆಗಳು | (ಆರ್ಮ್ಸ್ಟ್ರಾಂಗ್ ಮತ್ತು ಇತರರು, 2011; ಅಟ್ಕಿನ್ಸನ್ ಮತ್ತು ಇತರರು, 2018; ಬಾರ್ಬೆಡೋ & ಕೊಯೆನಿಗ್ಕನ್, 2018; ಕೊವಾಲೆವ್ ಮತ್ತು ವೊರೊಶಿಲೋವಾ, 2020; ಸುವೊಮಲೈನೆನ್ ಮತ್ತು ಇತರರು., 2013; ಥಾಮ್ ಮತ್ತು ಇತರರು, 2013) |
ಕೃಷಿಯಲ್ಲಿ ಬಹುಶಿಸ್ತೀಯ ಮತ್ತು ಬಹುಪಯೋಗಿ ತಂತ್ರಜ್ಞಾನವಾಗಿ, ಡ್ರೋನ್ಗಳನ್ನು ವಿವಿಧ ದೃಷ್ಟಿಕೋನಗಳಿಂದ ತನಿಖೆ ಮಾಡಲಾಗಿದೆ. ಉದಾಹರಣೆಗೆ, ವಿದ್ವಾಂಸರು ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಪರಿಶೀಲಿಸಿದ್ದಾರೆ (ಕುಲ್ಬಕಿ ಮತ್ತು ಇತರರು, 2018; ಮೊಗಿಲಿ ಮತ್ತು ದೀಪಕ್, 2018), ನಿಖರವಾದ ಕೃಷಿಗೆ ಅವರ ಕೊಡುಗೆ (ಪುರಿ ಮತ್ತು ಇತರರು, 2017; ತ್ಸೌರೋಸ್ ಮತ್ತು ಇತರರು, 2019), ಇತರರೊಂದಿಗೆ ಅವುಗಳ ಪೂರಕತೆ ಅತ್ಯಾಧುನಿಕ ತಂತ್ರಜ್ಞಾನಗಳು (ಅಲ್-ಥಾನಿ ಮತ್ತು ಇತರರು, 2020; ದತ್ತಾ ಮತ್ತು ಮಿತ್ರ, 2021; ನಯ್ಯರ್ ಮತ್ತು ಇತರರು, 2020; ಸಹಾ ಮತ್ತು ಇತರರು, 2018), ಮತ್ತು ಅವರ ನ್ಯಾವಿಗೇಷನಲ್ ಮತ್ತು ಸಂವೇದನಾ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಸಾಧ್ಯತೆಗಳು (alBare . , 2015; ಸುವೊಮಲೈನೆನ್ ಮತ್ತು ಇತರರು, 2014). ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಸಂಶೋಧನೆಯು ಪ್ರಚಲಿತವಾಗಿರುವುದರಿಂದ (ಖಾನ್ ಮತ್ತು ಇತರರು, 2021), ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಾಹಿತ್ಯವನ್ನು ಸಾರಾಂಶ ಮತ್ತು ಡೊಮೇನ್ನ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಬಹಿರಂಗಪಡಿಸುವ ಅವಶ್ಯಕತೆಯಿದೆ. ಇದಲ್ಲದೆ, ನಿರಂತರ ಸುಧಾರಣೆಗಳೊಂದಿಗೆ ಹೈಟೆಕ್ ಕ್ಷೇತ್ರವಾಗಿ, ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಾಹಿತ್ಯವನ್ನು ನಿಯತಕಾಲಿಕವಾಗಿ ಸಂಕ್ಷೇಪಿಸಲು ಮತ್ತು ಪ್ರಮುಖ ಸಂಶೋಧನಾ ಅಂತರವನ್ನು ಗುರುತಿಸಲು ರಚನಾತ್ಮಕ ವಿಮರ್ಶೆಗಳನ್ನು ನಡೆಸಬೇಕಾಗುತ್ತದೆ. ಗೆ
ದಿನಾಂಕ, ಕೃಷಿ ವಲಯದಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಚರ್ಚಿಸುವ ಕೆಲವು ವಿಮರ್ಶೆಗಳಿವೆ. ಉದಾಹರಣೆಗೆ, ಮೊಗಿಲಿ ಮತ್ತು ದೀಪಕ್ (2018) ಬೆಳೆ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ಕೀಟನಾಶಕ ಸಿಂಪರಣೆಗಾಗಿ ಡ್ರೋನ್ಗಳ ಪರಿಣಾಮಗಳನ್ನು ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಪರಿಶೀಲಿಸಿದ್ದಾರೆ. Inoue (2020) ಕೃಷಿಯಲ್ಲಿ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನಲ್ಲಿ ಉಪಗ್ರಹ ಮತ್ತು ಡ್ರೋನ್ ಬಳಕೆಯ ವಿಮರ್ಶೆಯನ್ನು ನಡೆಸುತ್ತದೆ. ಲೇಖಕರು ಸ್ಮಾರ್ಟ್ ಕೃಷಿಯನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುವ ತಾಂತ್ರಿಕ ಸವಾಲುಗಳನ್ನು ಮತ್ತು ಕೇಸ್ ಸ್ಟಡೀಸ್ ಮತ್ತು ಉತ್ತಮ ಅಭ್ಯಾಸಗಳ ಆಧಾರದ ಮೇಲೆ ಉಪಗ್ರಹಗಳು ಮತ್ತು ಡ್ರೋನ್ಗಳ ಕೊಡುಗೆಗಳನ್ನು ಪರಿಶೋಧಿಸಿದ್ದಾರೆ. ಟ್ಸೌರೋಸ್ ಮತ್ತು ಇತರರು. (2019) ವಿವಿಧ ರೀತಿಯ ಡ್ರೋನ್ಗಳು ಮತ್ತು ಕೃಷಿಯಲ್ಲಿ ಅವುಗಳ ಮುಖ್ಯ ಅನ್ವಯಿಕೆಗಳನ್ನು ಸಾರಾಂಶಗೊಳಿಸಿ, ವಿವಿಧ ಡೇಟಾ ಸ್ವಾಧೀನ ಮತ್ತು ಸಂಸ್ಕರಣಾ ವಿಧಾನಗಳನ್ನು ಎತ್ತಿ ತೋರಿಸುತ್ತದೆ. ತೀರಾ ಇತ್ತೀಚೆಗೆ, ಅಸ್ಲಾನ್ ಮತ್ತು ಇತರರು. (2022) ಕೃಷಿ ಚಟುವಟಿಕೆಗಳಲ್ಲಿ UAV ಅಪ್ಲಿಕೇಶನ್ಗಳ ಸಮಗ್ರ ಪರಿಶೀಲನೆಯನ್ನು ನಡೆಸಿತು ಮತ್ತು ಹಸಿರುಮನೆಯಲ್ಲಿ UAV ಗಾಗಿ ಏಕಕಾಲಿಕ ಸ್ಥಳೀಕರಣ ಮತ್ತು ಮ್ಯಾಪಿಂಗ್ನ ಪ್ರಸ್ತುತತೆಯನ್ನು ಒತ್ತಿಹೇಳಿತು. ಡಯಾಜ್-ಗೊನ್ಜಾಲೆಜ್ ಮತ್ತು ಇತರರು. (2022) ವಿವಿಧ ಯಂತ್ರ ಕಲಿಕೆಯ ತಂತ್ರಗಳು ಮತ್ತು ರಿಮೋಟ್ ಆಧಾರಿತ ಬೆಳೆ ಇಳುವರಿ ಉತ್ಪಾದನೆಯ ಇತ್ತೀಚಿನ ಅಧ್ಯಯನಗಳನ್ನು ಪರಿಶೀಲಿಸಲಾಗಿದೆ
ಸಂವೇದನಾ ವ್ಯವಸ್ಥೆಗಳು. ಮಣ್ಣಿನ ಸೂಚಕಗಳನ್ನು ಅಂದಾಜು ಮಾಡಲು ಮತ್ತು ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್, ಮಾಹಿತಿ ತಾತ್ಕಾಲಿಕತೆ ಮತ್ತು ನಮ್ಯತೆಯ ವಿಷಯದಲ್ಲಿ ಉಪಗ್ರಹ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಮೀರಿಸಲು UAV ಗಳು ಉಪಯುಕ್ತವೆಂದು ಅವರ ಸಂಶೋಧನೆಗಳು ಸೂಚಿಸಿವೆ. ಬಸಿರಿ ಮತ್ತು ಇತರರು. (2022) ನಿಖರವಾದ ಕೃಷಿಯ ಸಂದರ್ಭದಲ್ಲಿ ಬಹು-ರೋಟರ್ UAV ಗಳಿಗೆ ಮಾರ್ಗ-ಯೋಜನೆ ಸವಾಲುಗಳನ್ನು ಜಯಿಸಲು ವಿವಿಧ ವಿಧಾನಗಳು ಮತ್ತು ವಿಧಾನಗಳ ಸಮಗ್ರ ವಿಮರ್ಶೆಯನ್ನು ಮಾಡಿದೆ. ಇದಲ್ಲದೆ, ಅವೈಸ್ ಮತ್ತು ಇತರರು. (2022) ನೀರಿನ ಸ್ಥಿತಿಯನ್ನು ಅಂದಾಜು ಮಾಡಲು ಬೆಳೆಗಳಲ್ಲಿ UAV ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಡೇಟಾದ ಅನ್ವಯವನ್ನು ಸಾರಾಂಶ ಮಾಡಿದೆ ಮತ್ತು ತ್ಯಾಜ್ಯ ಒತ್ತಡದ ಅನ್ವಯಕ್ಕಾಗಿ UAV ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನ ನಿರೀಕ್ಷಿತ ಸಾಮರ್ಥ್ಯದ ಆಳವಾದ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ಒದಗಿಸಿದೆ. ಅಂತಿಮವಾಗಿ, ಅಕ್ವಿಲಾನಿ ಮತ್ತು ಇತರರು. (2022) ಹುಲ್ಲುಗಾವಲು ಆಧಾರಿತ ಜಾನುವಾರು ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಅನ್ವಯಿಸಲಾದ ಪೂರ್ವಭಾವಿ ಕೃಷಿ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಪರಿಶೀಲಿಸಲಾಗಿದೆ ಮತ್ತು UAV ಗಳಿಂದ ಸಕ್ರಿಯಗೊಳಿಸಲಾದ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಜೀವರಾಶಿ ಮೌಲ್ಯಮಾಪನ ಮತ್ತು ಹಿಂಡಿನ ನಿರ್ವಹಣೆಗೆ ಅನುಕೂಲಕರವಾಗಿದೆ ಎಂದು ನಿರ್ಣಯಿಸಲಾಗಿದೆ.
ಅಲ್ಲದೆ, ಜಾನುವಾರುಗಳ ಮೇಲ್ವಿಚಾರಣೆ, ಟ್ರ್ಯಾಕಿಂಗ್ ಮತ್ತು ಮಸ್ಟರಿಂಗ್ನಲ್ಲಿ UAV ಗಳನ್ನು ಬಳಸುವ ಪ್ರಯತ್ನಗಳು ಇತ್ತೀಚೆಗೆ ವರದಿಯಾಗಿದೆ.
ಈ ವಿಮರ್ಶೆಗಳು ಹೊಸ ಮತ್ತು ಪ್ರಮುಖ ಒಳನೋಟಗಳನ್ನು ನೀಡಿದರೂ, ಗ್ರಂಥಮಾಪನವನ್ನು ಆಧರಿಸಿದ ಯಾವುದೇ ಸಮಗ್ರ ಮತ್ತು ನವೀಕೃತ ವಿಮರ್ಶೆಯು ಸಾಹಿತ್ಯದಲ್ಲಿ ಕಂಡುಬರುವುದಿಲ್ಲ, ಇದು ಸ್ಪಷ್ಟವಾದ ಜ್ಞಾನದ ಅಂತರವನ್ನು ಪ್ರಸ್ತುತಪಡಿಸುತ್ತದೆ. ಇದಲ್ಲದೆ, ವೈಜ್ಞಾನಿಕ ಡೊಮೇನ್ನಲ್ಲಿ ವಿದ್ವತ್ಪೂರ್ಣ ಉತ್ಪಾದನೆಯು ಬೆಳೆದಾಗ, ಡೊಮೇನ್ನ ಜ್ಞಾನದ ರಚನೆಯನ್ನು ಗ್ರಹಿಸಲು ಸಂಶೋಧಕರು ಪರಿಮಾಣಾತ್ಮಕ ವಿಮರ್ಶೆ ವಿಧಾನಗಳನ್ನು ಬಳಸಿಕೊಳ್ಳುವುದು ಅತ್ಯಗತ್ಯ ಎಂದು ಹೇಳಲಾಗಿದೆ (ರಿವೇರಾ & ಪಿಜಮ್, 2015). ಅಂತೆಯೇ, ಫೆರೀರಾ ಮತ್ತು ಇತರರು. (2014) ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರಗಳು ಪ್ರಬುದ್ಧವಾಗಿ ಮತ್ತು ಸಂಕೀರ್ಣವಾದಂತೆ, ವಿದ್ವಾಂಸರು ಹೊಸ ಕೊಡುಗೆಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು, ಸಂಶೋಧನಾ ಸಂಪ್ರದಾಯಗಳು ಮತ್ತು ಪ್ರವೃತ್ತಿಗಳನ್ನು ಸೆರೆಹಿಡಿಯಲು, ಯಾವ ವಿಷಯಗಳನ್ನು ಅಧ್ಯಯನ ಮಾಡಲಾಗಿದೆ ಎಂಬುದನ್ನು ಗುರುತಿಸಲು ಮತ್ತು ಜ್ಞಾನದ ರಚನೆಯನ್ನು ಅಧ್ಯಯನ ಮಾಡಲು ಸಾಂದರ್ಭಿಕವಾಗಿ ರಚಿಸಲಾದ ಮತ್ತು ಸಂಗ್ರಹಿಸಲಾದ ಜ್ಞಾನವನ್ನು ಅರ್ಥ ಮಾಡಿಕೊಳ್ಳುವ ಗುರಿಯನ್ನು ಹೊಂದಿರಬೇಕು ಎಂದು ವಾದಿಸಿದರು. ಕ್ಷೇತ್ರ ಮತ್ತು ಸಂಭಾವ್ಯ ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳು. Raparelli ಮತ್ತು Bajocco (2019) ಕೃಷಿ ಮತ್ತು ಅರಣ್ಯದಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಜ್ಞಾನದ ಡೊಮೇನ್ ಅನ್ನು ಪರೀಕ್ಷಿಸಲು ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯನ್ನು ನಡೆಸಿದರೆ, ಅವರ ಅಧ್ಯಯನವು 1995 ಮತ್ತು 2017 ರ ನಡುವೆ ಪ್ರಕಟವಾದ ಪಾಂಡಿತ್ಯಪೂರ್ಣ ಸಂಶೋಧನೆಯನ್ನು ಮಾತ್ರ ಪರಿಗಣಿಸುತ್ತದೆ, ಇದು ಈ ವೇಗವಾಗಿ ಚಲಿಸುವ ಪ್ರದೇಶದ ಡೈನಾಮಿಕ್ಸ್ ಅನ್ನು ಪ್ರತಿಬಿಂಬಿಸುವುದಿಲ್ಲ. ಇದಲ್ಲದೆ, ಲೇಖಕರು ಕ್ಷೇತ್ರದಲ್ಲಿ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಕೊಡುಗೆಗಳನ್ನು ಗುರುತಿಸಲು ಪ್ರಯತ್ನಿಸಲಿಲ್ಲ, ಸಾಹಿತ್ಯವನ್ನು ಕ್ಲಸ್ಟರ್ ಮಾಡಲು ಮತ್ತು ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲು ಪ್ರಯತ್ನಿಸಲಿಲ್ಲ. ಪರಿಣಾಮವಾಗಿ, ಪ್ರಸ್ತುತ ಸಂಶೋಧನಾ ಕೇಂದ್ರಗಳು, ಪ್ರವೃತ್ತಿಗಳು ಮತ್ತು ಹಾಟ್ಸ್ಪಾಟ್ಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು ಸಾಹಿತ್ಯವನ್ನು ಸಾರಾಂಶ ಮಾಡುವುದು ಅವಶ್ಯಕ.
ಈ ಜ್ಞಾನದ ಅಂತರವನ್ನು ತುಂಬಲು, ಡ್ರೋನ್ಗಳು ಮತ್ತು ಕೃಷಿಯ ಛೇದಕದಲ್ಲಿ ಪ್ರಸ್ತುತ ಸಂಶೋಧನೆಯ ಸ್ಥಿತಿಯನ್ನು ಪರೀಕ್ಷಿಸಲು ನಾವು ಪರಿಮಾಣಾತ್ಮಕ ವಿಧಾನ ಮತ್ತು ಕಠಿಣ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಧಾನಗಳನ್ನು ಬಳಸುತ್ತೇವೆ. ಪ್ರಸ್ತುತ ಅಧ್ಯಯನವು ಕೃಷಿಯಲ್ಲಿ ಹೆಚ್ಚು ಅಗತ್ಯವಿರುವ ಉದಯೋನ್ಮುಖ ತಂತ್ರಜ್ಞಾನವನ್ನು ಪರಿಶೀಲಿಸುವ ಮೂಲಕ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಾಹಿತ್ಯಕ್ಕೆ ಹಲವಾರು ಕೊಡುಗೆಗಳನ್ನು ನೀಡುತ್ತದೆ ಎಂದು ನಾವು ವಾದಿಸುತ್ತೇವೆ ಏಕೆಂದರೆ ಇದು ಈ ವಲಯದಲ್ಲಿ ಹಲವಾರು ಅಂಶಗಳನ್ನು ಬದಲಾಯಿಸಲು ಪ್ರಚಂಡ ಸಾಮರ್ಥ್ಯವನ್ನು ಒದಗಿಸುತ್ತದೆ. ಕೃಷಿ ಸಂದರ್ಭದೊಳಗೆ ಡ್ರೋನ್ಗಳ ಬಗ್ಗೆ ಚದುರಿದ ಮತ್ತು ವಿಭಜಿತ ಜ್ಞಾನವನ್ನು ನೀಡಿದರೆ ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯ ಅಗತ್ಯವನ್ನು ಇನ್ನಷ್ಟು ಗ್ರಹಿಸಲಾಗುತ್ತದೆ. ಅಂತೆಯೇ, ಈ ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರದ ಅಡಿಪಾಯವನ್ನು ನಿರ್ಮಿಸುವ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಅಧ್ಯಯನಗಳನ್ನು ಪರಿಗಣಿಸಿ, ಕೃಷಿ ಡ್ರೋನ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ಸಾಹಿತ್ಯವನ್ನು ವ್ಯವಸ್ಥಿತವಾಗಿ ಕ್ಲಸ್ಟರ್ ಮಾಡಬೇಕಾಗುತ್ತದೆ. ವಿಶ್ಲೇಷಣೆಯಲ್ಲಿನ ಅರ್ಹತೆಯು ಸಾಹಿತ್ಯದಲ್ಲಿ ಪ್ರತಿನಿಧಿಸುವ ಮುಖ್ಯ ಸಂಶೋಧನಾ ವಿಷಯಗಳ ಸ್ಪಷ್ಟೀಕರಣವನ್ನು ಸಹ ಒಳಗೊಂಡಿದೆ. ತಂತ್ರಜ್ಞಾನದ ರೂಪಾಂತರದ ಸಾಮರ್ಥ್ಯವನ್ನು ಪರಿಗಣಿಸಿ, ಪ್ರಭಾವಶಾಲಿ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ಧರಿಸುವ ಮೂಲಕ ಮತ್ತು ಕೃಷಿಗೆ ಡ್ರೋನ್ಗಳ ಸಾಮರ್ಥ್ಯದ ಬಗ್ಗೆ ವಿಷಯಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುವ ಮೂಲಕ ಆಳವಾದ ನೆಟ್ವರ್ಕ್ ವಿಶ್ಲೇಷಣೆಯು ಹೊಸ ಒಳನೋಟಗಳನ್ನು ನೀಡುತ್ತದೆ ಎಂದು ನಾವು ಪ್ರತಿಪಾದಿಸುತ್ತೇವೆ.
ಆದ್ದರಿಂದ ನಾವು ಈ ಕೆಳಗಿನ ಸಂಶೋಧನಾ ಉದ್ದೇಶಗಳನ್ನು ಸಾಧಿಸಲು ಪ್ರಯತ್ನಿಸುತ್ತೇವೆ:
- ಕೃಷಿ ಕ್ಷೇತ್ರದಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ಅತ್ಯುತ್ತಮ ಕೊಡುಗೆಗಳೊಂದಿಗೆ ಪ್ರಭಾವಶಾಲಿ ಪ್ರಕಟಣೆಗಳ ಗುರುತಿಸುವಿಕೆ.
- ಸಾಹಿತ್ಯದ ಕ್ಲಸ್ಟರಿಂಗ್, ಸಂಶೋಧನಾ ಕೇಂದ್ರಗಳ ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಶಬ್ದಾರ್ಥದ ಹೋಲಿಕೆಯ ಆಧಾರದ ಮೇಲೆ ಮುಖ್ಯ 'ಬೌದ್ಧಿಕ ರಚನೆ' ಅಧ್ಯಯನಗಳ ಮ್ಯಾಪಿಂಗ್.
- ಕ್ಷೇತ್ರದಲ್ಲಿನ ವಿವಿಧ ಪ್ರಕಟಣೆಗಳ ನಡುವೆ ಕಾಲಾನಂತರದಲ್ಲಿ ಸಂಪರ್ಕಗಳು ಮತ್ತು ಉಲ್ಲೇಖ ಜಾಲಗಳ ವಿಕಾಸದ ತಿಳುವಳಿಕೆ ಮತ್ತು ಭವಿಷ್ಯದ ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳು ಮತ್ತು ಬಿಸಿ ವಿಷಯಗಳ ಗುರುತಿಸುವಿಕೆ.
ಉಳಿದ ಕಾಗದವನ್ನು ಈ ಕೆಳಗಿನಂತೆ ರಚಿಸಲಾಗಿದೆ: ವಿಭಾಗ 2 ವಿಧಾನ ಮತ್ತು ಡೇಟಾ ಸಂಗ್ರಹಣೆ ಹಂತಗಳನ್ನು ವಿವರಿಸುತ್ತದೆ; ವಿಭಾಗ 3 ವಿಶ್ಲೇಷಣೆಯ ಫಲಿತಾಂಶಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ; ಮತ್ತು ವಿಭಾಗ 4 ಸಂಶೋಧನೆಗಳನ್ನು ಚರ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಸಂಶೋಧನಾ ಕೊಡುಗೆಗಳು, ಪರಿಣಾಮಗಳು ಮತ್ತು ಭವಿಷ್ಯದ ನಿರ್ದೇಶನಗಳೊಂದಿಗೆ ಮುಕ್ತಾಯಗೊಳ್ಳುತ್ತದೆ.
ವಿಧಾನ
ಈ ಪ್ರಸ್ತುತ ಸಂಶೋಧನಾ ಅಧ್ಯಯನದಲ್ಲಿ, ನಾವು ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಅನ್ವೇಷಿಸಲು ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯನ್ನು ನಡೆಸುತ್ತೇವೆ. ಈ ಪರಿಮಾಣಾತ್ಮಕ ವಿಧಾನವು ಜ್ಞಾನದ ಡೊಮೇನ್ನ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ (ಅರೋರಾ ಮತ್ತು ಚಕ್ರವರ್ತಿ, 2021) ಮತ್ತು ಈ ವಿಧಾನವನ್ನು ಅನ್ವಯಿಸುವ ಮೂಲಕ ತನಿಖೆ ಮಾಡಬಹುದಾದ ಪ್ರಸ್ತುತ ಸ್ಥಿತಿ, ಬಿಸಿ ವಿಷಯಗಳು ಮತ್ತು ಭವಿಷ್ಯದ ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳನ್ನು (ಕಪೂರ್ ಮತ್ತು ಇತರರು, 2018; ಮಿಶ್ರಾ ಮತ್ತು ಇತರರು. , 2017; A. ರೆಜೆಬ್, ರೆಜೆಬ್, ಮತ್ತು ಇತರರು, 2021b; A. ರೆಜೆಬ್ ಮತ್ತು ಇತರರು, 2021d; MA ರೆಜೆಬ್ ಮತ್ತು ಇತರರು., 2020). ಸಾಮಾನ್ಯವಾಗಿ, ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯು ಲಿಖಿತ ಸಂವಹನದ ಗುಪ್ತ ನಮೂನೆಗಳನ್ನು ಮತ್ತು ಅಂಕಿಅಂಶಗಳು ಮತ್ತು ಗಣಿತದ ವಿಧಾನಗಳ ಆಧಾರದ ಮೇಲೆ ಶಿಸ್ತಿನ ವಿಕಸನವನ್ನು ಸಂಕ್ಷಿಪ್ತಗೊಳಿಸಲು ಮತ್ತು ಬಹಿರಂಗಪಡಿಸಲು ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಾಹಿತ್ಯವನ್ನು ಪರಿಶೀಲಿಸುತ್ತದೆ ಮತ್ತು ಇದು ದೊಡ್ಡ ಡೇಟಾ ಸೆಟ್ಗಳಿಗೆ ಅನ್ವಯಿಸುತ್ತದೆ (ಪ್ರಿಚರ್ಡ್, 1969; ಸಣ್ಣ, 1999; ತಹೈ & ರಿಗ್ಸ್ಬೈ , 1998). ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ಸ್ ಅನ್ನು ಬಳಸುವ ಮೂಲಕ, ಹೋಲಿಕೆಯ ಆಧಾರದ ಮೇಲೆ ಡೊಮೇನ್ಗೆ ಕೊಡುಗೆ ನೀಡುವ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಮಾದರಿಗಳು ಮತ್ತು ಸಂಶೋಧನಾ ಕೇಂದ್ರಗಳನ್ನು ಚೆನ್ನಾಗಿ ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ನಾವು ಬಯಸುತ್ತೇವೆ (ಥೆಲ್ವಾಲ್, 2008). ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ಸ್ ವಿಧಾನದ ವಸ್ತುನಿಷ್ಠ ಪರಿಮಾಣಾತ್ಮಕ ಶಕ್ತಿಯಿಂದ ಬೆಂಬಲಿತವಾದ ಹೊಸ ಒಳನೋಟಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ (ಕ್ಯಾಸಿಲ್ಲಾಸ್ & ಅಸಿಡೋ, 2007). ಹಲವಾರು ವಿದ್ವಾಂಸರು ಈ ಹಿಂದೆ ಕೃಷಿ, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಡಿಜಿಟಲ್ ರೂಪಾಂತರ ಸೇರಿದಂತೆ ಸಂಬಂಧಿತ ಡೊಮೇನ್ಗಳಲ್ಲಿ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ಅಧ್ಯಯನಗಳನ್ನು ನಡೆಸಿದ್ದಾರೆ (ಅರ್ಮೆಂಟಾ-ಮೆಡಿನಾ ಮತ್ತು ಇತರರು, 2020; ಬೌಜೆಂಬ್ರಾಕ್ ಮತ್ತು ಇತರರು., 2019; ಎ. ರೆಜೆಬ್, ಟ್ರೀಬ್ಲ್ಮೇಯರ್, ಮತ್ತು ಇತರರು; ವಂಬಾ., 2021 & ಕ್ವಿರೋಜ್, 2021; ವಾಂಗ್ ಮತ್ತು ಇತರರು, 2019).
ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆ
ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ನಿರ್ದಿಷ್ಟ ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರಕ್ಕೆ ವಿವಿಧ ಒಳನೋಟಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. ಮೊದಲನೆಯದಾಗಿ, ನಿರ್ದಿಷ್ಟ ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರಕ್ಕೆ ಕೊಡುಗೆ ನೀಡುವ ಮತ್ತು ಮಹತ್ವದ ಪ್ರಭಾವ ಬೀರುವ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಲೇಖಕರು ಮತ್ತು ಪ್ರಕಟಣೆಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು ಇದು ಸಹಾಯ ಮಾಡುತ್ತದೆ (ಗುಂಡೋಲ್ಫ್ & ಫಿಲ್ಸರ್, 2013). ಎರಡನೆಯದಾಗಿ, ಜ್ಞಾನದ ಹರಿವು ಮತ್ತು ಲೇಖಕರ ನಡುವಿನ ಸಂವಹನ ಕೊಂಡಿಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಬಹುದು. ಅಂತಿಮವಾಗಿ, ಉಲ್ಲೇಖಿಸಿದ ಮತ್ತು ಉಲ್ಲೇಖಿಸಿದ ಕೃತಿಗಳ ನಡುವಿನ ಲಿಂಕ್ಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವ ಮೂಲಕ, ಕಾಲಾನಂತರದಲ್ಲಿ ಜ್ಞಾನದ ಡೊಮೇನ್ನ ಬದಲಾವಣೆಗಳು ಮತ್ತು ವಿಕಾಸವನ್ನು ಅನ್ವೇಷಿಸಬಹುದು (ಪೌರ್ನೇಡರ್
ಮತ್ತು ಇತರರು, 2020). ಪ್ರಕಟಣೆಯ ಹೆಚ್ಚಿನ ಉಲ್ಲೇಖ ಸಂಖ್ಯೆಗಳು ಅದರ ಪ್ರಸ್ತುತತೆ ಮತ್ತು ಸಂಶೋಧನಾ ಡೊಮೇನ್ಗೆ ಗಣನೀಯ ಕೊಡುಗೆಗಳನ್ನು ಪ್ರತಿಬಿಂಬಿಸುತ್ತವೆ (ಬಾಲ್ಡಿ, 1998; ಗುಂಡೋಲ್ಫ್ & ಫಿಲ್ಸರ್, 2013; ಮರಿಂಕೊ, 1998). ಪ್ರಕಟಣೆಗಳ ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ಸಂಬಂಧಿತ ಕೃತಿಗಳನ್ನು ಗುರುತಿಸಲು ಮತ್ತು ಕಾಲಾನಂತರದಲ್ಲಿ ಅವುಗಳ ಜನಪ್ರಿಯತೆ ಮತ್ತು ಪ್ರಗತಿಯನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಡಾಕ್ಯುಮೆಂಟ್ ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆ
ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯು ಪ್ರಕಟಣೆಗಳ ನಡುವಿನ ಸಂಬಂಧಗಳನ್ನು ಅನ್ವೇಷಿಸಲು ಮತ್ತು ಕ್ಷೇತ್ರದ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಚಿತ್ರಿಸಲು ಒಂದು ಮೌಲ್ಯಯುತ ವಿಧಾನವಾಗಿದೆ (ನೆರೂರ್ ಮತ್ತು ಇತರರು, 2008). ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಹೇಳುವುದಾದರೆ, ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಿದ ಪ್ರಕಟಣೆಗಳು ಮತ್ತು ಅವುಗಳ ಸಂಪರ್ಕಗಳನ್ನು ಗುರುತಿಸುವ ಮೂಲಕ, ವಿಧಾನವು ಪ್ರಕಟಣೆಗಳನ್ನು ವಿಭಿನ್ನ ಸಂಶೋಧನಾ ಸಮೂಹಗಳಾಗಿ ಗುಂಪು ಮಾಡುತ್ತದೆ, ಇದರಲ್ಲಿ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ನಿಯಮಿತವಾಗಿ ಒಂದೇ ರೀತಿಯ ಆಲೋಚನೆಗಳನ್ನು ಹಂಚಿಕೊಳ್ಳುತ್ತವೆ (ಮೆಕೇನ್, 1990; ಸಣ್ಣ, 1973). ಸಾಮ್ಯತೆಯು ಪ್ರಕಟಣೆಗಳ ಸಂಶೋಧನೆಗಳು ಎಂದು ಅರ್ಥವಲ್ಲ ಎಂದು ನಮೂದಿಸುವುದು ನಿರ್ಣಾಯಕವಾಗಿದೆ
ಒಗ್ಗೂಡುವಿಕೆ ಮತ್ತು ಪರಸ್ಪರ ಒಪ್ಪಿಗೆ; ವಿಷಯದ ಹೋಲಿಕೆಯಿಂದಾಗಿ ಪ್ರಕಟಣೆಗಳು ಒಂದೇ ಕ್ಲಸ್ಟರ್ಗೆ ಸೇರಿರುತ್ತವೆ, ಆದರೆ ಅವುಗಳು ವ್ಯತಿರಿಕ್ತ ದೃಷ್ಟಿಕೋನಗಳನ್ನು ಹೊಂದಿರಬಹುದು.
ಡೇಟಾ ಸಂಗ್ರಹಣೆ ಮತ್ತು ವಿಶ್ಲೇಷಣೆ
ವೈಟ್ ಮತ್ತು ಗ್ರಿಫಿತ್ (1981) ಪ್ರಸ್ತಾಪಿಸಿದ ವಿಧಾನವನ್ನು ಅನುಸರಿಸಿ, ನಾವು ಈ ಕೆಳಗಿನ ಐದು ಹಂತಗಳನ್ನು ಅನುಸರಿಸುವ ಮೂಲಕ ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಸಂಪೂರ್ಣ ಸಂಶೋಧನಾ ಡೊಮೇನ್ ಅನ್ನು ಒಳಗೊಳ್ಳಲು ಜರ್ನಲ್ ಲೇಖನಗಳ ಸಮಗ್ರ ಹುಡುಕಾಟವನ್ನು ನಡೆಸಿದ್ದೇವೆ:
- ಮೊದಲ ಹಂತವು ಮಾಹಿತಿ ಸಂಗ್ರಹವಾಗಿತ್ತು. ಪ್ರಮಾಣಿತ ಫಲಿತಾಂಶಗಳೊಂದಿಗೆ ಸ್ಕೋಪಸ್ ಅನ್ನು ಅತ್ಯಂತ ಸಮಗ್ರ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹ ಡೇಟಾಬೇಸ್ಗಳಲ್ಲಿ ಒಂದಾಗಿ ಆಯ್ಕೆ ಮಾಡಲಾಗಿದೆ. ಕೃಷಿಯಲ್ಲಿನ ಎಲ್ಲಾ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ಪ್ರಕಟಣೆಗಳ ಮೆಟಾ-ಡೇಟಾವನ್ನು ಹಿಂಪಡೆಯಲಾಗಿದೆ. ನಂತರ ನಾವು ಆಯ್ದ ಲೇಖನಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಿದ್ದೇವೆ, ವಿಶ್ಲೇಷಣೆಯಿಂದ ವಿಷಯದ ಲೇಖನಗಳನ್ನು ತೆಗೆದುಹಾಕುತ್ತೇವೆ.
- ನಾವು ಸಾಹಿತ್ಯವನ್ನು ವಿಶ್ಲೇಷಿಸಿದ್ದೇವೆ ಮತ್ತು ಸಂಶೋಧನಾ ಪ್ರದೇಶದಲ್ಲಿ ಬಳಸುವ ಪ್ರಮುಖ ಕೀವರ್ಡ್ಗಳನ್ನು ಗುರುತಿಸಿದ್ದೇವೆ.
- ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಬಳಸಿಕೊಂಡು, ಆಧಾರವಾಗಿರುವ ಉಲ್ಲೇಖ ಮಾದರಿಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು ಲೇಖಕರು ಮತ್ತು ದಾಖಲೆಗಳ ನಡುವಿನ ಸಂಪರ್ಕವನ್ನು ನಾವು ಅನ್ವೇಷಿಸಿದ್ದೇವೆ. ನಾವು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಕ್ಷೇತ್ರಕ್ಕೆ ಗಮನಾರ್ಹ ಕೊಡುಗೆಗಳೊಂದಿಗೆ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಲೇಖಕರು ಮತ್ತು ಪ್ರಕಟಣೆಗಳನ್ನು ಗುರುತಿಸಿದ್ದೇವೆ.
- ಒಂದೇ ರೀತಿಯ ಪ್ರಕಟಣೆಗಳನ್ನು ಕ್ಲಸ್ಟರ್ಗಳಾಗಿ ಗುಂಪು ಮಾಡಲು ನಾವು ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯನ್ನು ನಡೆಸಿದ್ದೇವೆ.
- ಅಂತಿಮವಾಗಿ, ಸಹಯೋಗ ಜಾಲವನ್ನು ಚಿತ್ರಿಸಲು ನಾವು ದೇಶಗಳು, ಸಂಸ್ಥೆಗಳು ಮತ್ತು ಜರ್ನಲ್ಗಳ ನಡುವಿನ ಸಂಪರ್ಕಗಳು ಮತ್ತು ಸಂಪರ್ಕಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಿದ್ದೇವೆ.
ಸೂಕ್ತವಾದ ಹುಡುಕಾಟ ಪದಗಳ ಗುರುತಿಸುವಿಕೆ
ಡೇಟಾ ಒಟ್ಟುಗೂಡಿಸುವಿಕೆಗಾಗಿ ನಾವು ಈ ಕೆಳಗಿನ ಹುಡುಕಾಟ ಸ್ಟ್ರಿಂಗ್ಗಳನ್ನು ಅನ್ವಯಿಸಿದ್ದೇವೆ: (ಡ್ರೋನ್* ಅಥವಾ “ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ” ಅಥವಾ uav* ಅಥವಾ “ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆ”ಅಥವಾ US ಅಥವಾ "ರಿಮೋಟ್ ಪೈಲಟ್ ವಿಮಾನ”) ಮತ್ತು (ಕೃಷಿ ಅಥವಾ ಕೃಷಿ ಅಥವಾ ಕೃಷಿ ಅಥವಾ ರೈತ) ಹುಡುಕಾಟವನ್ನು ಸೆಪ್ಟೆಂಬರ್ 2021 ರಲ್ಲಿ ನಡೆಸಲಾಯಿತು. ಡ್ರೋನ್ಗಳು UAV, UAS ಮತ್ತು ರಿಮೋಟ್ ಪೈಲಟ್ ವಿಮಾನಗಳು ಸೇರಿದಂತೆ ಹಲವಾರು ಪದನಾಮಗಳನ್ನು ಹೊಂದಿವೆ (Sah et al., 2021). ಅಬ್ದೊಲ್ಲಾಹಿ ಮತ್ತು ಇತರರ ಅಧ್ಯಯನದ ಆಧಾರದ ಮೇಲೆ ಕೃಷಿಗೆ ಸಂಬಂಧಿಸಿದ ನಿರ್ದಿಷ್ಟ ಹುಡುಕಾಟ ಪದಗಳನ್ನು ಗುರುತಿಸಲಾಗಿದೆ. (2021) ಸ್ಪಷ್ಟತೆ ಮತ್ತು ಪಾರದರ್ಶಕತೆಗಾಗಿ, ನಾವು ಬಳಸಿದ ನಿಖರವಾದ ಪ್ರಶ್ನೆಯನ್ನು ಅನುಬಂಧ 1 ರಲ್ಲಿ ನೀಡಲಾಗಿದೆ. ಡೇಟಾ ಶುಚಿಗೊಳಿಸುವ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಅನುಸರಿಸಿ, ನಾವು ಪಠ್ಯ ಫೈಲ್ ಅನ್ನು ರಚಿಸಿದ್ದೇವೆ, ಅದನ್ನು ತರುವಾಯ ಬೈಬ್ಎಕ್ಸೆಲ್ಗೆ ಲೋಡ್ ಮಾಡಲಾಗಿದೆ, ಇದು ಉಲ್ಲೇಖ ಮತ್ತು ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಗಾಗಿ ಸಾಮಾನ್ಯ ಸಾಧನವಾಗಿದೆ. ಈ ಉಪಕರಣವು ಇತರ ಸಾಫ್ಟ್ವೇರ್ಗಳೊಂದಿಗೆ ಸರಳವಾದ ಸಂವಹನವನ್ನು ನೀಡುತ್ತದೆ ಮತ್ತು ಡೇಟಾ ನಿರ್ವಹಣೆ ಮತ್ತು ವಿಶ್ಲೇಷಣೆಯಲ್ಲಿ ಗಮನಾರ್ಹ ಮಟ್ಟದ ಸ್ವಾತಂತ್ರ್ಯವನ್ನು ನೀಡುತ್ತದೆ. VOSviewer ಆವೃತ್ತಿ 1.6.16 ಅನ್ನು ಸಂಶೋಧನೆಗಳನ್ನು ದೃಶ್ಯೀಕರಿಸಲು ಮತ್ತು ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ನೆಟ್ವರ್ಕ್ಗಳನ್ನು ರಚಿಸಲು ಬಳಸಲಾಗಿದೆ (ಎಕ್ & ವಾಲ್ಟ್ಮ್ಯಾನ್, 2009). VOSviewer ನಿರ್ದಿಷ್ಟವಾಗಿ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ನಕ್ಷೆಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಲು ಅರ್ಥಗರ್ಭಿತ ದೃಶ್ಯೀಕರಣದ ಶ್ರೇಣಿಯನ್ನು ನೀಡುತ್ತದೆ (ಗೆಂಗ್ ಮತ್ತು ಇತರರು, 2020). ಇದಲ್ಲದೆ, ಫಲಿತಾಂಶಗಳನ್ನು ಉತ್ತಮವಾಗಿ ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಸಹಾಯ ಮಾಡುವ ಸರಳ ದೃಶ್ಯ ಫಲಿತಾಂಶಗಳನ್ನು ಒದಗಿಸುವಲ್ಲಿ ಇದು ಸಹಾಯ ಮಾಡುತ್ತದೆ (ಅಬ್ದೊಲ್ಲಾಹಿ ಮತ್ತು ಇತರರು, 2021). ಮೇಲೆ ಹೇಳಿದಂತೆ ಹುಡುಕಾಟದ ತಂತಿಗಳನ್ನು ಅನ್ವಯಿಸಿ, ನಾವು ಎಲ್ಲಾ ಸಂಬಂಧಿತ ಪ್ರಕಟಣೆಗಳನ್ನು ಸಂಗ್ರಹಿಸಿದ್ದೇವೆ ಮತ್ತು ಸಂಗ್ರಹಿಸಿದ್ದೇವೆ. ಮೊದಲ ಹುಡುಕಾಟ ಫಲಿತಾಂಶಗಳು ಒಟ್ಟು 5,085 ದಾಖಲೆಗಳನ್ನು ನೀಡಿವೆ. ಆಯ್ದ ಮಾದರಿಯ ಗುಣಮಟ್ಟವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಸಂಶೋಧನೆಯಲ್ಲಿ ಪೀರ್-ರಿವ್ಯೂಡ್ ಜರ್ನಲ್ ಲೇಖನಗಳನ್ನು ಮಾತ್ರ ಪರಿಗಣಿಸಲಾಗಿದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಪುಸ್ತಕಗಳು, ಅಧ್ಯಾಯಗಳು, ಕಾನ್ಫರೆನ್ಸ್ ನಡಾವಳಿಗಳು ಮತ್ತು ಸಂಪಾದಕೀಯ ಟಿಪ್ಪಣಿಗಳಂತಹ ಇತರ ದಾಖಲೆ ಪ್ರಕಾರಗಳನ್ನು ಹೊರಗಿಡಲಾಗಿದೆ. ಸ್ಕ್ರೀನಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ಅಪ್ರಸ್ತುತ (ಅಂದರೆ, ಈ ಕೆಲಸದ ವ್ಯಾಪ್ತಿಯನ್ನು ಮೀರಿ), ಅನಗತ್ಯ (ಅಂದರೆ, ಡಬಲ್ ಇಂಡೆಕ್ಸಿಂಗ್ನಿಂದ ಹುಟ್ಟಿದ ನಕಲುಗಳು), ಮತ್ತು ಇಂಗ್ಲಿಷ್-ಮಾತನಾಡದ ಪ್ರಕಟಣೆಗಳನ್ನು ಫಿಲ್ಟರ್ ಮಾಡಲಾಗಿದೆ. ಈ ಪ್ರಕ್ರಿಯೆಯು ಅಂತಿಮ ವಿಶ್ಲೇಷಣೆಯಲ್ಲಿ 4,700 ದಾಖಲೆಗಳನ್ನು ಸೇರಿಸಲು ಕಾರಣವಾಯಿತು.
ಸಂಶೋಧನೆಗಳು ಮತ್ತು ಚರ್ಚೆ
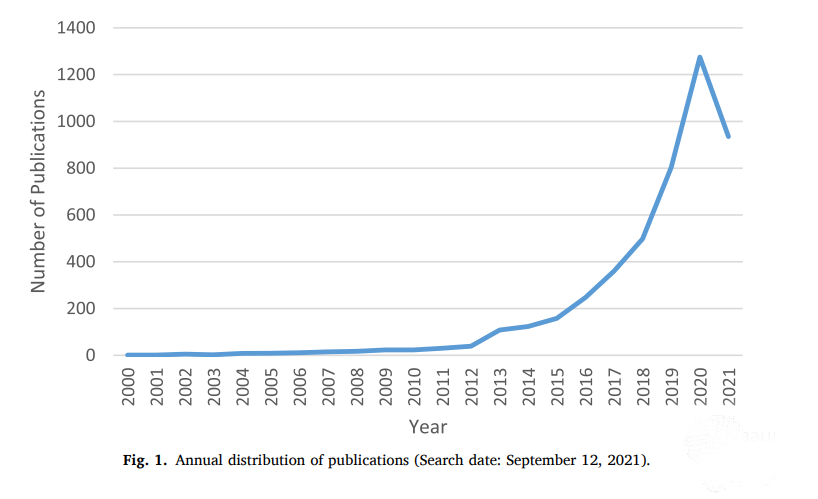
ಪ್ರಾರಂಭಿಸಲು, ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಕುರಿತು ಪ್ರಸ್ತುತ ಸಾಹಿತ್ಯದಲ್ಲಿ ಪ್ರಕಟಣೆಯ ಉತ್ಪಾದನೆಯಲ್ಲಿನ ಬೆಳವಣಿಗೆಗಳನ್ನು ನಾವು ವಿಶ್ಲೇಷಿಸಿದ್ದೇವೆ. ವಿದ್ವತ್ಪೂರ್ಣ ಸಂಶೋಧನೆಯ ತಾತ್ಕಾಲಿಕ ವಿತರಣೆಯನ್ನು ಚಿತ್ರ 1 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 2011 ರಿಂದ (30 ಪ್ರಕಟಣೆಗಳು) ಪ್ರಕಟಣೆಗಳಲ್ಲಿ ತ್ವರಿತ ಹೆಚ್ಚಳವನ್ನು ನಾವು ನೋಡುತ್ತೇವೆ; ಆದ್ದರಿಂದ, ನಾವು ವಿಶ್ಲೇಷಣೆಯ ಅವಧಿಯನ್ನು ಎರಡು ವಿಭಿನ್ನ ಹಂತಗಳಾಗಿ ವಿಭಜಿಸಲು ನಿರ್ಧರಿಸಿದ್ದೇವೆ. ನಾವು 1990 ಮತ್ತು 2010 ರ ನಡುವಿನ ಅವಧಿಯನ್ನು ಬಿಲ್ಡ್-ಅಪ್ ಹಂತ ಎಂದು ಉಲ್ಲೇಖಿಸುತ್ತೇವೆ, ಇದು ವಾರ್ಷಿಕವಾಗಿ ಸುಮಾರು ಏಳು ಪತ್ರಿಕೆಗಳನ್ನು ಪ್ರಕಟಿಸುತ್ತದೆ. 2010 ರ ನಂತರದ ಅವಧಿಯನ್ನು ಬೆಳವಣಿಗೆಯ ಹಂತ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ಏಕೆಂದರೆ ಈ ಅವಧಿಯಲ್ಲಿ ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಸಂಶೋಧನೆಯು ಘಾತೀಯವಾದ ಉಲ್ಬಣಕ್ಕೆ ಸಾಕ್ಷಿಯಾಗಿದೆ. 2010 ರ ನಂತರ, ಹೆಚ್ಚುತ್ತಿರುವ ಪ್ರಕಟಣೆಗಳ ಸಂಖ್ಯೆಯು ಸಂಶೋಧಕರಲ್ಲಿ ಹೆಚ್ಚುತ್ತಿರುವ ಆಸಕ್ತಿಯನ್ನು ದೃಢಪಡಿಸುತ್ತದೆ, ಇದು ಡ್ರೋನ್ಗಳನ್ನು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ಗೆ ಅನ್ವಯಿಸಲಾಗಿದೆ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಬಳಸಲಾಗಿದೆ ಎಂದು ಪ್ರತಿಬಿಂಬಿಸುತ್ತದೆ (ಡೆಂಗ್ ಮತ್ತು ಇತರರು, 2018; ಮೇಸ್ & ಸ್ಟೆಪ್ಪೆ, 2019; ಮೆಸ್ಸಿನಾ & ಮೋದಿಕಾ, 2020 ) ನಿರ್ದಿಷ್ಟವಾಗಿ ಹೇಳುವುದಾದರೆ, ಪ್ರಕಟಣೆಗಳ ಸಂಖ್ಯೆಯು 108 ರಲ್ಲಿ 2013 ರಿಂದ 498 ರಲ್ಲಿ 2018 ಕ್ಕೆ ಏರಿತು ಮತ್ತು 1,275 ರಲ್ಲಿ 2020 ಕ್ಕೆ ಏರಿತು. ಒಟ್ಟು 935 ಲೇಖನಗಳನ್ನು ಜನವರಿ ಮತ್ತು ಸೆಪ್ಟೆಂಬರ್ 2021 ರ ನಡುವೆ ಪ್ರಕಟಿಸಲಾಗಿದೆ. ತರುವಾಯ, ನಾವು ಬೆಳವಣಿಗೆಯ ಹಂತದ ಮೇಲೆ ನಮ್ಮ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಹೆಚ್ಚು ಕೇಂದ್ರೀಕರಿಸಲು ನಿರ್ಧರಿಸಿದ್ದೇವೆ. ಈ ಅವಧಿಯು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಇತ್ತೀಚಿನ ಮತ್ತು ಪ್ರಮುಖ ಸೂಕ್ಷ್ಮತೆಗಳನ್ನು ಪ್ರತಿಬಿಂಬಿಸುತ್ತದೆ.
ಕೀವರ್ಡ್ ವಿಶ್ಲೇಷಣೆ
ಲೇಖಕರು ಪ್ರಕಟಣೆಗಾಗಿ ಆಯ್ಕೆ ಮಾಡುವ ಕೀವರ್ಡ್ಗಳು ಕಾಗದವನ್ನು ಹೇಗೆ ಪ್ರತಿನಿಧಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ವೈಜ್ಞಾನಿಕ ಸಮುದಾಯಗಳಲ್ಲಿ ಅದನ್ನು ಹೇಗೆ ಸಂವಹನ ಮಾಡಲಾಗುತ್ತದೆ ಎಂಬುದರ ಮೇಲೆ ನಿರ್ಣಾಯಕ ಪ್ರಭಾವ ಬೀರುತ್ತದೆ. ಅವರು ಸಂಶೋಧನೆಯ ಪ್ರಮುಖ ವಿಷಯಗಳನ್ನು ಗುರುತಿಸುತ್ತಾರೆ ಮತ್ತು ಅದರ ಅಭಿವೃದ್ಧಿ ಅಥವಾ ವಿಫಲಗೊಳ್ಳುವ ಸಾಮರ್ಥ್ಯವನ್ನು ನಿರ್ಧರಿಸುತ್ತಾರೆ (ಡೇ & ಗ್ಯಾಸ್ಟಲ್, 1998.; ಕಿಮ್ ಮತ್ತು ಇತರರು, 2016; ಉದ್ದೀನ್ ಮತ್ತು ಇತರರು., 2015). ಕೀವರ್ಡ್ಗಳ ವಿಶ್ಲೇಷಣೆ, ವಿಶಾಲವಾದ ಸಂಶೋಧನಾ ಪ್ರವೃತ್ತಿಗಳು ಮತ್ತು ನಿರ್ದೇಶನಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುವ ಸಾಧನವಾಗಿದೆ, ಡೊಮೇನ್ನಲ್ಲಿನ ಎಲ್ಲಾ ಸಂಬಂಧಿತ ಪ್ರಕಟಣೆಗಳ ಕೀವರ್ಡ್ಗಳ ಸಂಕಲನವನ್ನು ಸೂಚಿಸುತ್ತದೆ (ದೀಕ್ಷಿತ್ ಮತ್ತು ಜಖರ್, 2021). ಪ್ರಸ್ತುತ ಅಧ್ಯಯನದಲ್ಲಿ, ಹೆಚ್ಚು ಜನಪ್ರಿಯ ವಿಷಯಗಳನ್ನು ಅನ್ವೇಷಿಸಲು ನಾವು ಒಟ್ಟುಗೂಡಿದ ಕೀವರ್ಡ್ಗಳನ್ನು ಎರಡು ಸೆಟ್ಗಳಾಗಿ ವಿಂಗಡಿಸಿದ್ದೇವೆ (ಅಂದರೆ, 2010 ಮತ್ತು 2011-2021 ರವರೆಗೆ). ಇದನ್ನು ಮಾಡುವ ಮೂಲಕ, ನಾವು ಎರಡೂ ಸೆಟ್ಗಳಲ್ಲಿ ನಿರ್ಣಾಯಕ ಕೀವರ್ಡ್ಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಬಹುದು ಮತ್ತು ಅಗತ್ಯವಿರುವ ಎಲ್ಲಾ ಡೇಟಾವನ್ನು ನಾವು ಸೆರೆಹಿಡಿದಿದ್ದೇವೆ ಎಂದು ಭರವಸೆ ನೀಡಬಹುದು. ಪ್ರತಿ ಸೆಟ್ಗೆ, ಅಗ್ರ ಹತ್ತು ಕೀವರ್ಡ್ಗಳನ್ನು ಟೇಬಲ್ 3 ರಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗಿದೆ. ನಾವು "ಡ್ರೋನ್" ಮತ್ತು "ಡ್ರೋನ್" ಅಥವಾ ಅದೇ ರೀತಿ "ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್" ಮತ್ತು "IoT" ನಂತಹ ಶಬ್ದಾರ್ಥದ ಒಂದೇ ರೀತಿಯ ಕೀವರ್ಡ್ಗಳನ್ನು ವಿಲೀನಗೊಳಿಸುವ ಮೂಲಕ ಅಸಂಗತತೆಗಳನ್ನು ತೆಗೆದುಹಾಕಿದ್ದೇವೆ.
ಎರಡೂ ಕಾಲಾವಧಿಯಲ್ಲಿ "ಡ್ರೋನ್" ಮತ್ತು "ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆ" ಗಳಿಗೆ ಹೋಲಿಸಿದರೆ "ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ" ಹೆಚ್ಚಾಗಿ ಬಳಸುವ ಕೀವರ್ಡ್ ಎಂದು ಟೇಬಲ್ 3 ತೋರಿಸುತ್ತದೆ. ಅಲ್ಲದೆ, "ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್," "ನಿಖರವಾದ ಕೃಷಿ" ಮತ್ತು "ಕೃಷಿ" ಎರಡೂ ಅವಧಿಗಳಲ್ಲಿ ಹೆಚ್ಚು ಸ್ಥಾನ ಪಡೆದಿವೆ. ಮೊದಲ ಅವಧಿಯಲ್ಲಿ, "ನಿಖರವಾದ ಕೃಷಿ" ಐದನೇ ಸ್ಥಾನದಲ್ಲಿದೆ ಮತ್ತು ಎರಡನೇ ಅವಧಿಯಲ್ಲಿ ಇದು ಎರಡನೇ ಸ್ಥಾನದಲ್ಲಿದೆ, ಇದು ನಿಖರವಾದ ಕೃಷಿಯನ್ನು ಸಾಧಿಸುವಲ್ಲಿ ಡ್ರೋನ್ಗಳು ಹೇಗೆ ಹೆಚ್ಚು ಪ್ರಾಮುಖ್ಯತೆಯನ್ನು ಪಡೆಯುತ್ತಿವೆ ಎಂಬುದನ್ನು ವಿವರಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಅವುಗಳು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಬಹುದು,
ಇತರ ದೂರಸಂವೇದಿ ಮತ್ತು ನೆಲ-ಆಧಾರಿತ ವ್ಯವಸ್ಥೆಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಪತ್ತೆಹಚ್ಚುವಿಕೆ ಮತ್ತು ಅಂದಾಜು ಅಭ್ಯಾಸಗಳು ವೇಗವಾಗಿ, ಅಗ್ಗದ ಮತ್ತು ನಿರ್ವಹಿಸಲು ಸುಲಭವಾಗಿದೆ. ಅಲ್ಲದೆ, ಅವರು ಅಗತ್ಯವಿದ್ದಾಗ (ಉದಾ, ನೀರು ಅಥವಾ ಕೀಟನಾಶಕಗಳು) ನಿಖರವಾದ ಪ್ರಮಾಣದ ಇನ್ಪುಟ್ ಅನ್ನು ಸಿಂಪಡಿಸಬಹುದು (ಗುವೋ ಮತ್ತು ಇತರರು, 2020; ಇನೌ, 2020; ಪಾಂಡೆ, ಪ್ರತಿಹಸ್ಟ್, ಮತ್ತು ಇತರರು, 2020).
ಹೆಚ್ಚಾಗಿ ಬಳಸುವ ಕೀವರ್ಡ್ಗಳ ಪಟ್ಟಿ.
ಶ್ರೇಣಿ | 1990-2010 | ಸಂಖ್ಯೆ ಘಟನೆಗಳು | 2011-2021 | ಸಂಖ್ಯೆ ಘಟನೆಗಳು |
| 1 | ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ | 28 | ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ | 1628 |
| 2 | ದೂರ ಸಂವೇದಿ | 7 | ನಿಖರತೆ ಕೃಷಿ | 489 |
| 3 | ಕೃಷಿ | 4 | ದೂರ ಸಂವೇದಿ | 399 |
| 4 | ವಾಯುಗಾಮಿ | 4 | ಡ್ರೋನ್ | 374 |
| 5 | ನಿಖರತೆ ಕೃಷಿ | 4 | ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆ | 271 |
| 6 | ಮಾನವರಹಿತ ವೈಮಾನಿಕ | 4 | ಕೃಷಿ | 177 |
| 7 | ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸಂವೇದಕ | 3 | ಆಳವಾದ ಕಲಿಕೆ | 151 |
| 8 | ಕೃತಕ ನರ ಜಾಲಗಳು | 2 | ಯಂತ್ರ ಕಲಿಕೆ | 149 |
| 9 | ಸ್ವಾಯತ್ತ ಹಾರಾಟ | 2 | ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕ | 142 |
| 10 | ಕಾಫಿ | 2 | ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ | 124 |
ಮತ್ತೊಂದು ಆಸಕ್ತಿದಾಯಕ ವೈಶಿಷ್ಟ್ಯವೆಂದರೆ ಪೂರಕ ತಂತ್ರಜ್ಞಾನಗಳ ಉಪಸ್ಥಿತಿ. ಮೊದಲ ಹಂತದಲ್ಲಿ, "ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸೆನ್ಸರ್" ಮತ್ತು "ಕೃತಕ ನರಮಂಡಲಗಳು" (ANN) ಟಾಪ್ ಹತ್ತು ಕೀವರ್ಡ್ಗಳಲ್ಲಿ ಸೇರಿವೆ. ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ವಿವಿಧ ತರಂಗಾಂತರಗಳಲ್ಲಿ ಬೃಹತ್ ಸಂಖ್ಯೆಯ ಚಿತ್ರಗಳನ್ನು ಸಂಗ್ರಹಿಸುವ ಮೂಲಕ ಸಾಂಪ್ರದಾಯಿಕ ಚಿತ್ರಣವನ್ನು ಕ್ರಾಂತಿಗೊಳಿಸಿತು. ಹಾಗೆ ಮಾಡುವಾಗ, ಸಂವೇದಕಗಳು ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್, ಸ್ಪೆಕ್ಟ್ರೋಸ್ಕೋಪಿ ಮತ್ತು RGB ಚಿತ್ರಣಕ್ಕೆ ಹೋಲಿಸಿದರೆ ಉತ್ತಮ ಪ್ರಾದೇಶಿಕ ಮತ್ತು ರೋಹಿತದ ಮಾಹಿತಿಯನ್ನು ಏಕಕಾಲದಲ್ಲಿ ಸಂಗ್ರಹಿಸಬಹುದು (Adao ˜ et al.,
2017). ಮೊದಲ ಹಂತದಲ್ಲಿ “ಎಎನ್ಎನ್” ಮತ್ತು ಎರಡನೆಯದರಲ್ಲಿ “ಡೀಪ್ ಲರ್ನಿಂಗ್” (ಡಿಎಲ್) ಮತ್ತು “ಮೆಷಿನ್ ಲರ್ನಿಂಗ್” (ಎಂಎಲ್) ಸಂಭವಿಸುವಿಕೆಯು ಪ್ರಕಟವಾದ ಹೆಚ್ಚಿನ ಕೃತಿಗಳು ಡ್ರೋನ್ಗಾಗಿ ಎಐ ತಂತ್ರಗಳ ಸಾಮರ್ಥ್ಯದ ಪರೀಕ್ಷೆಯ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸಿದೆ ಎಂದು ಸೂಚಿಸುತ್ತದೆ. ಆಧಾರಿತ ಕೃಷಿ. ಡ್ರೋನ್ಗಳು ಸ್ವಾಯತ್ತವಾಗಿ ಹಾರುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದ್ದರೂ, ಅವುಗಳಿಗೆ ಇನ್ನೂ ಪೈಲಟ್ನ ಒಳಗೊಳ್ಳುವಿಕೆಯ ಅಗತ್ಯವಿರುತ್ತದೆ, ಇದು ಕಡಿಮೆ ಮಟ್ಟದ ಸಾಧನದ ಬುದ್ಧಿವಂತಿಕೆಯನ್ನು ಸೂಚಿಸುತ್ತದೆ. ಆದಾಗ್ಯೂ, AI ತಂತ್ರಗಳ ಪ್ರಗತಿಯಿಂದಾಗಿ ಈ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಬಹುದು, ಇದು ಉತ್ತಮ ಸಾಂದರ್ಭಿಕ ಅರಿವು ಮತ್ತು ಸ್ವಾಯತ್ತ ನಿರ್ಧಾರ ಬೆಂಬಲವನ್ನು ಒದಗಿಸುತ್ತದೆ. AI ಹೊಂದಿದ, ಡ್ರೋನ್ಗಳು ನ್ಯಾವಿಗೇಷನ್ ಸಮಯದಲ್ಲಿ ಘರ್ಷಣೆಯನ್ನು ತಪ್ಪಿಸಬಹುದು, ಮಣ್ಣು ಮತ್ತು ಬೆಳೆ ನಿರ್ವಹಣೆಯನ್ನು ಸುಧಾರಿಸಬಹುದು (ಇನೌ, 2020), ಮತ್ತು ಮಾನವರಿಗೆ ಶ್ರಮ ಮತ್ತು ಒತ್ತಡವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ (BK ಶರ್ಮಾ ಮತ್ತು ಇತರರು, 2019).
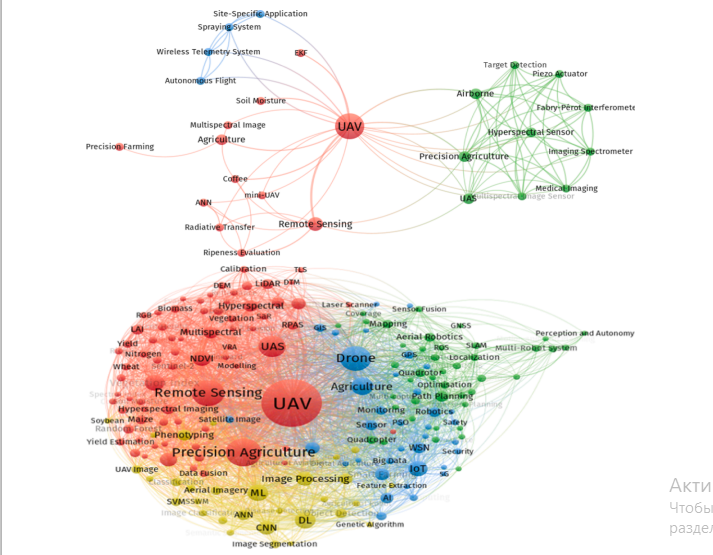
ಅವುಗಳ ನಮ್ಯತೆ ಮತ್ತು ಅಪಾರ ಪ್ರಮಾಣದ ರೇಖಾತ್ಮಕವಲ್ಲದ ಡೇಟಾವನ್ನು ನಿರ್ವಹಿಸುವ ಸಾಮರ್ಥ್ಯದಿಂದಾಗಿ, ಡ್ರೋನ್ಗಳು ಮತ್ತು ಇತರ ರಿಮೋಟ್-ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಗ್ರೌಂಡ್-ಆಧಾರಿತ ಸಿಸ್ಟಮ್ಗಳು ಭವಿಷ್ಯ ಮತ್ತು ನಿರ್ಧಾರ-ಮಾಡುವಿಕೆಗಾಗಿ ಹರಡುವ ಡೇಟಾವನ್ನು ವಿಶ್ಲೇಷಿಸಲು AI ತಂತ್ರಗಳು ಸೂಕ್ತ ವಿಧಾನಗಳಾಗಿವೆ (ಅಲಿ ಮತ್ತು ಇತರರು, 2015; ಇನೌ, 2020). ಇದಲ್ಲದೆ, ಎರಡನೇ ಅವಧಿಯಲ್ಲಿ "IoT" ಉಪಸ್ಥಿತಿಯು ಕೃಷಿಯಲ್ಲಿ ಅದರ ಉದಯೋನ್ಮುಖ ಪಾತ್ರವನ್ನು ಸೂಚಿಸುತ್ತದೆ. ಡ್ರೋನ್ಗಳು, ML, DL, WSN ಗಳು ಮತ್ತು ದೊಡ್ಡ ಡೇಟಾ ಸೇರಿದಂತೆ ಇತರ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಪರಸ್ಪರ ಸಂಪರ್ಕಿಸುವ ಮೂಲಕ IoT ಕೃಷಿಯಲ್ಲಿ ಕ್ರಾಂತಿಯನ್ನುಂಟು ಮಾಡುತ್ತಿದೆ. IoT ಅನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುವ ಪ್ರಮುಖ ಪ್ರಯೋಜನವೆಂದರೆ ನೈಜ ಸಮಯದಲ್ಲಿ (ಎಲಿಜಾ ಮತ್ತು ಇತರರು, 2018; ಫೆಂಗ್ ಮತ್ತು ಇತರರು. , 2019; ಮುವಾಂಗ್ಪ್ರಥುಬ್ ಮತ್ತು ಇತರರು, 2019). ಇದಲ್ಲದೆ, ಸಸ್ಯವರ್ಗದ ಶಕ್ತಿ ಮತ್ತು ಸಸ್ಯವರ್ಗದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಅಗತ್ಯವಾದ ಡೇಟಾವನ್ನು ಸೆರೆಹಿಡಿಯಲು ಡ್ರೋನ್ಗಳನ್ನು ಸಮರ್ಥ ಸಾಧನಗಳೆಂದು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ (ಕ್ಯಾಂಡಿಯಾಗೊ ಮತ್ತು ಇತರರು, 2015). Fig. 2a ಮತ್ತು 2b ಎರಡೂ ಸಮಯದ ಅವಧಿಗಳಿಗಾಗಿ ಕೀವರ್ಡ್ ಸಹ-ಸಂಭವಿಸುವ ನೆಟ್ವರ್ಕ್ಗಳನ್ನು ವಿವರಿಸುತ್ತದೆ.
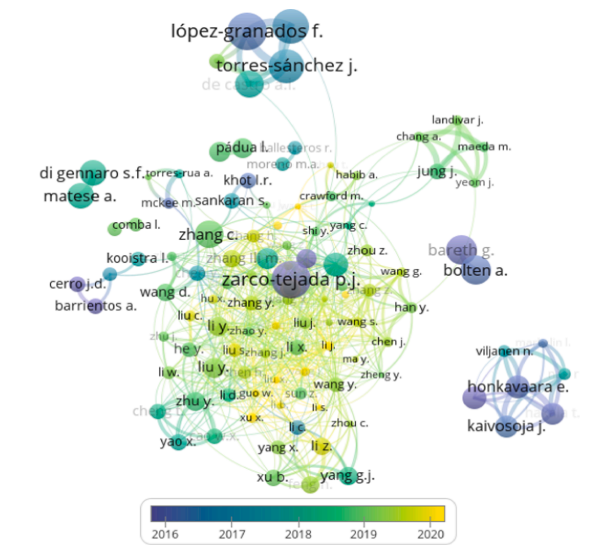
ಪ್ರಭಾವಿ ಲೇಖಕರು
ಈ ವಿಭಾಗದಲ್ಲಿ, ನಾವು ಪ್ರಭಾವಶಾಲಿ ಲೇಖಕರನ್ನು ನಿರ್ಧರಿಸುತ್ತೇವೆ ಮತ್ತು ಲೇಖಕರ ಉಲ್ಲೇಖದ ಜಾಲಗಳು ಪ್ರಸ್ತುತ ಸಾಹಿತ್ಯವನ್ನು ಹೇಗೆ ದೃಶ್ಯೀಕರಿಸಬಹುದು ಮತ್ತು ಸಂಘಟಿಸಬಹುದು ಎಂಬುದನ್ನು ಪರಿಶೀಲಿಸುತ್ತೇವೆ. ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಉಲ್ಲೇಖಗಳನ್ನು ಹೊಂದಿರುವ ಎಲ್ಲಾ ಸಂಶೋಧಕರ ಕಾಲಾನುಕ್ರಮದ ಮೇಲ್ಪದರವನ್ನು ಚಿತ್ರ 3 ತೋರಿಸುತ್ತದೆ. ಬಣ್ಣದ ಪ್ರಮಾಣವು ಲೇಖಕರ ಉಲ್ಲೇಖಗಳ ವರ್ಷವಾರು ವ್ಯತ್ಯಾಸವನ್ನು ಪ್ರತಿಬಿಂಬಿಸುತ್ತದೆ. ಕನಿಷ್ಠ 50 ಉಲ್ಲೇಖಗಳು ಮತ್ತು ಹತ್ತು ಪ್ರಕಟಣೆಗಳ ಮಿತಿಯನ್ನು ಬಳಸಿಕೊಂಡು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಕುರಿತು ಅಧ್ಯಯನಗಳನ್ನು ಪ್ರಕಟಿಸಿದ ಸಂಶೋಧಕರ ಉಲ್ಲೇಖದ ರಚನೆಯನ್ನು ನಾವು ಪರಿಶೀಲಿಸುತ್ತೇವೆ. ಹೊರಗೆ
12,891 ಲೇಖಕರು, ಕೇವಲ 115 ಮಂದಿ ಈ ಸ್ಥಿತಿಯನ್ನು ಪೂರೈಸಿದ್ದಾರೆ. ಗರಿಷ್ಠ ಸಂಖ್ಯೆಯ ಉಲ್ಲೇಖಗಳಿಂದ ವಿಂಗಡಿಸಲಾದ ಅಗ್ರ ಹತ್ತು ಪ್ರಭಾವಶಾಲಿ ಲೇಖಕರನ್ನು ಕೋಷ್ಟಕ 4 ಪಟ್ಟಿ ಮಾಡುತ್ತದೆ. ಲೋಪೆಜ್- ಗ್ರಾನಡೋಸ್ ಎಫ್. 1,963 ಉಲ್ಲೇಖಗಳೊಂದಿಗೆ ಪಟ್ಟಿಯಲ್ಲಿ ಮುಂಚೂಣಿಯಲ್ಲಿದ್ದಾರೆ, 1,909 ಉಲ್ಲೇಖಗಳೊಂದಿಗೆ ಜಾರ್ಕೊ-ತೇಜಡಾ ಪಿಜೆ ನಂತರದ ಸ್ಥಾನದಲ್ಲಿದ್ದಾರೆ.
ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಿದ ಲೇಖಕರ ಪಟ್ಟಿ.
| ರ್ಯಾಂಕಿಂಗ್ | ಲೇಖಕ | ಆಧಾರಗಳ |
| 1 | ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್ ಎಫ್. | 1,963 |
| 2 | ಜಾರ್ಕೊ-ತೇಜಡಾ ಪಿಜೆ | 1,909 |
| 3 | ಪೆನಾ ˜ ಜೆಎಂ | 1,644 |
| 4 | ಟೊರೆಸ್-S´ ಆಂಚೆಜ್ ಜೆ. | 1,576 |
| 5 | ಫೆರೆಸ್ ಇ | 1,339 |
| 6 | ರೆಮೊಂಡಿನೊ ಎಫ್ | 1,235 |
| 7 | ಬೋಲ್ಟನ್ ಎ | 1,160 |
| 8 | ಬರೆತ್ ಜಿ | 1,155 |
| 9 | ಬರ್ನಿ ಜೆಎ | 1,132 |
| 10 | ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ AI | 1,036 |
ಇದು ವೈಯಕ್ತಿಕ ಪ್ರಕಟಣೆಗಳಿಗೆ ಬಂದಾಗ, ಜಾಂಗ್ ಮತ್ತು ಕೊವಾಕ್ಸ್ (2012) ಲೇಖನವು ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಪ್ರಕಟವಾದ ಹೆಚ್ಚು ಉಲ್ಲೇಖಿತ ಅಧ್ಯಯನವಾಗಿದೆ. ಇಲ್ಲಿ, ಲೇಖಕರು ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ UAS ನ ಅಪ್ಲಿಕೇಶನ್ ಅನ್ನು ಪರಿಶೀಲಿಸಿದ್ದಾರೆ. ವಿಶ್ವಾಸಾರ್ಹ ಅಂತಿಮ ಉತ್ಪನ್ನಗಳನ್ನು ರೈತರಿಗೆ ಒದಗಿಸಲು ವೇದಿಕೆಯ ವಿನ್ಯಾಸ, ಉತ್ಪಾದನೆ, ಇಮೇಜ್ ಜಿಯೋರೆಫರೆನ್ಸಿಂಗ್ನ ಪ್ರಮಾಣೀಕರಣ ಮತ್ತು ಮಾಹಿತಿ ಮರುಪಡೆಯುವಿಕೆ ವರ್ಕ್ಫ್ಲೋ ಅನ್ನು ಮುನ್ನಡೆಸುವ ಅವಶ್ಯಕತೆಯಿದೆ ಎಂದು ಅವರ ಸಂಶೋಧನೆಯ ಸಂಶೋಧನೆಗಳು ಸೂಚಿಸುತ್ತವೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ವಿಶೇಷವಾಗಿ ಕ್ಷೇತ್ರ ಯೋಜನೆ, ಚಿತ್ರ ಸೆರೆಹಿಡಿಯುವಿಕೆ ಮತ್ತು ಡೇಟಾ ವ್ಯಾಖ್ಯಾನ ಮತ್ತು ವಿಶ್ಲೇಷಣೆಯಲ್ಲಿ ರೈತರನ್ನು ಹೆಚ್ಚು ಬಲವಾಗಿ ತೊಡಗಿಸಿಕೊಳ್ಳಲು ಅವರು ಶಿಫಾರಸು ಮಾಡುತ್ತಾರೆ. ಮುಖ್ಯವಾಗಿ, ಫೀಲ್ಡ್ ಮ್ಯಾಪಿಂಗ್, ಹುರುಪು ಮ್ಯಾಪಿಂಗ್, ರಾಸಾಯನಿಕ ಅಂಶದ ಮಾಪನ, ಸಸ್ಯವರ್ಗದ ಒತ್ತಡದ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ಸಸ್ಯಗಳ ಬೆಳವಣಿಗೆಯ ಮೇಲೆ ರಸಗೊಬ್ಬರಗಳ ಪರಿಣಾಮಗಳ ಮೌಲ್ಯಮಾಪನದಲ್ಲಿ UAV ಯ ಪ್ರಾಮುಖ್ಯತೆಯನ್ನು ತೋರಿಸಲು ಈ ಅಧ್ಯಯನವು ಮೊದಲನೆಯದು. ತಂತ್ರಜ್ಞಾನಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ಸವಾಲುಗಳು ನಿಷೇಧಿತ ವೆಚ್ಚಗಳು, ಸಂವೇದಕ ಸಾಮರ್ಥ್ಯ, ಪ್ಲಾಟ್ಫಾರ್ಮ್ ಸ್ಥಿರತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆ, ಪ್ರಮಾಣೀಕರಣದ ಕೊರತೆ ಮತ್ತು ಬೃಹತ್ ಪ್ರಮಾಣದ ಡೇಟಾವನ್ನು ವಿಶ್ಲೇಷಿಸಲು ಸ್ಥಿರವಾದ ಕಾರ್ಯವಿಧಾನವನ್ನು ಒಳಗೊಂಡಿವೆ.
ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆ
ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ಲೇಖನಗಳ ಪ್ರಭಾವದ ಅಧ್ಯಯನವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ, ಆದರೂ ಹರಿವುಗಳಿಗೆ (ಉದಾಹರಣೆಗೆ, ಉಲ್ಲೇಖದ ಪಕ್ಷಪಾತ, ಸ್ವಯಂ-ಉಲ್ಲೇಖ) ಪ್ರಭಾವದ ಮೌಲ್ಯಮಾಪನಕ್ಕೆ ಪ್ರಮಾಣಿತ ಸಾಧನಗಳಲ್ಲಿ ಒಂದೆಂದು ಪರಿಗಣಿಸಲಾಗಿದೆ (Osareh, 1996; A. Rejeb et al., 2022; ಸರ್ಲಿ ಮತ್ತು ಇತರರು, 2010). ಉಲ್ಲೇಖಗಳು ನಿರ್ದಿಷ್ಟ ವಿಷಯದ ಮೇಲೆ ಸಾಹಿತ್ಯಕ್ಕೆ ಪೇಪರ್ಗಳ ಕೊಡುಗೆಗಳ ಪ್ರಾಮುಖ್ಯತೆ ಮತ್ತು ಜೀವಂತಿಕೆಯನ್ನು ಪ್ರತಿಬಿಂಬಿಸುತ್ತವೆ (ಆರ್. ಶರ್ಮಾ ಮತ್ತು ಇತರರು, 2022). ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮೇಲಿನ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಅಧ್ಯಯನಗಳನ್ನು ನಿರ್ಧರಿಸಲು ನಾವು ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆಯನ್ನು ನಡೆಸಿದ್ದೇವೆ ಮತ್ತು ವಿಷಯಗಳನ್ನು ಸಂಕ್ಷಿಪ್ತಗೊಳಿಸಿದ್ದೇವೆ. 5-1990 ಮತ್ತು 2010-2011 ಅವಧಿಗಳಿಗೆ ಹದಿನೈದು ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಪತ್ರಿಕೆಗಳ ಪಟ್ಟಿಯನ್ನು ಕೋಷ್ಟಕ 2021 ಪ್ರಸ್ತುತಪಡಿಸುತ್ತದೆ. ಬರ್ನಿ ಮತ್ತು ಇತರರ ಲೇಖನಗಳು. (2009)b ಮತ್ತು Austin (2010) 1990 ಮತ್ತು 2010 ರ ಅವಧಿಯಲ್ಲಿ ಕ್ರಮವಾಗಿ 831 ಮತ್ತು 498 ಉಲ್ಲೇಖಗಳೊಂದಿಗೆ ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಲ್ಪಟ್ಟಿವೆ. ಬರ್ನಿ ಮತ್ತು ಇತರರು. (2009)b ಕೈಗೆಟುಕುವ ಥರ್ಮಲ್ ಮತ್ತು ನ್ಯಾರೋಬ್ಯಾಂಡ್ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಸಂವೇದಕಗಳೊಂದಿಗೆ ಹೆಲಿಕಾಪ್ಟರ್ ಆಧಾರಿತ UAV ಮೂಲಕ ಪರಿಮಾಣಾತ್ಮಕ ರಿಮೋಟ್ಸೆನ್ಸಿಂಗ್ ಉತ್ಪನ್ನಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ವಿವರಿಸಿದೆ. ಸಾಂಪ್ರದಾಯಿಕ ಮಾನವಸಹಿತ ವಾಯುಗಾಮಿ ಸಂವೇದಕಗಳಿಗೆ ಹೋಲಿಸಿದರೆ, ಕೃಷಿಗಾಗಿ ಕಡಿಮೆ-ವೆಚ್ಚದ UAV ವ್ಯವಸ್ಥೆಯು ಉತ್ತಮವಲ್ಲದಿದ್ದರೂ, ಬೆಳೆಗಳ ಜೈವಿಕ ಭೌತಿಕ ನಿಯತಾಂಕಗಳ ಹೋಲಿಸಬಹುದಾದ ಅಂದಾಜುಗಳನ್ನು ಸಾಧಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಕೈಗೆಟುಕುವ ವೆಚ್ಚ ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯ ನಮ್ಯತೆ, ಹೆಚ್ಚಿನ ಸ್ಪೆಕ್ಟ್ರಲ್, ಪ್ರಾದೇಶಿಕ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ರೆಸಲ್ಯೂಶನ್ಗಳ ಜೊತೆಗೆ ತ್ವರಿತ ಟರ್ನ್ಅರೌಂಡ್ ಸಮಯದಲ್ಲಿ ಲಭ್ಯವಿರುತ್ತದೆ, ನೀರಾವರಿ ವೇಳಾಪಟ್ಟಿ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿ ಸೇರಿದಂತೆ ಸಮಯ-ನಿರ್ಣಾಯಕ ನಿರ್ವಹಣೆಯ ಅಗತ್ಯವಿರುವ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಶ್ರೇಣಿಗೆ UAV ಗಳನ್ನು ಸೂಕ್ತವಾಗಿದೆ. ಬರ್ನಿ ಮತ್ತು ಇತರರಿಂದ ಪತ್ರಿಕೆ. (2009)b ಅನ್ನು ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಲಾಗಿದೆ ಏಕೆಂದರೆ ಇದು ಮಾನವರಹಿತ ರೋಟರಿ-ವಿಂಗ್ ಪ್ಲಾಟ್ಫಾರ್ಮ್ ಮತ್ತು ಡಿಜಿಟಲ್ ಮತ್ತು ಥರ್ಮಲ್ ಸೆನ್ಸರ್ಗಳನ್ನು ಕೃಷಿ ಅನ್ವಯಿಕೆಗಳಿಗೆ ಅಗತ್ಯವಾದ ಮಾಪನಾಂಕ ನಿರ್ಣಯದ ಕಾರ್ಯವಿಧಾನಗಳೊಂದಿಗೆ ಪರಿಣಾಮಕಾರಿಯಾಗಿ ಸಂಯೋಜಿಸಿದೆ. ಎರಡನೆಯ ಅತಿ ಹೆಚ್ಚು ಉಲ್ಲೇಖಿತ ಪ್ರಕಟಣೆಯು ಆಸ್ಟಿನ್ (2010) ರವರು ಬರೆದ ಪುಸ್ತಕವಾಗಿದೆ, ಅವರು ವಿನ್ಯಾಸ, ಅಭಿವೃದ್ಧಿ ಮತ್ತು ನಿಯೋಜನೆಯ ದೃಷ್ಟಿಕೋನದಿಂದ UAV ಗಳನ್ನು ಚರ್ಚಿಸಿದ್ದಾರೆ. ಕೃಷಿಯಲ್ಲಿ, UAV ಗಳು ಬೆಳೆಗಳ ಬಣ್ಣ ಬದಲಾವಣೆಗಳ ಮೂಲಕ ರೋಗಗಳನ್ನು ಪತ್ತೆಹಚ್ಚುವ ಮೂಲಕ ಬೆಳೆ ಮೇಲ್ವಿಚಾರಣೆಯನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ, ಬೆಳೆ ಬಿತ್ತನೆ ಮತ್ತು ಸಿಂಪಡಿಸುವಿಕೆಯನ್ನು ಸುಲಭಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ಹಿಂಡುಗಳನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವುದು ಮತ್ತು ಚಾಲನೆ ಮಾಡುವುದು.
ಸುಲ್ಲಿವಾನ್ ಮತ್ತು ಇತರರ ಅಧ್ಯಯನಗಳು. (2007), ಲುಮ್ಮೆ ಮತ್ತು ಇತರರು. (2008), ಮತ್ತು Gokto ¨ ǧan et al. (2010) ಅಗ್ರ ಹದಿನೈದು ಹೆಚ್ಚು ಉಲ್ಲೇಖಿತ ಲೇಖನಗಳ ಪಟ್ಟಿಯನ್ನು ಮುಗಿಸಿ. ಕೃಷಿಯನ್ನು ಬೆಂಬಲಿಸಲು UAV ಆಧಾರಿತ ವ್ಯವಸ್ಥೆಗಳ ಅಭಿವೃದ್ಧಿಯನ್ನು ಈ ಲೇಖನಗಳು ವಿವರಿಸುತ್ತವೆ. ಅವರು ಬೆಳೆ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ಸ್ಕ್ಯಾನಿಂಗ್, ಕಳೆ ಕಣ್ಗಾವಲು ಮತ್ತು ನಿರ್ವಹಣೆ ಮತ್ತು ನಿರ್ಧಾರ ಬೆಂಬಲದಂತಹ ವಿವಿಧ ಸಮಸ್ಯೆಗಳಿಗೆ ಪರಿಹಾರಗಳನ್ನು ನೀಡುತ್ತಾರೆ. ಅವರು ಮಾದರಿ ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚಿಸಲು UAV ಯ ಸಾಮರ್ಥ್ಯವನ್ನು ಸೂಚಿಸುತ್ತಾರೆ ಮತ್ತು ಚರ್ಚಿಸುತ್ತಾರೆ ಮತ್ತು ನಿಖರವಾದ ಮತ್ತು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ರೂಪಿಸುವಲ್ಲಿ ರೈತರಿಗೆ ಸಹಾಯ ಮಾಡುತ್ತಾರೆ.
ನೆಟ್ಟ ತಂತ್ರಗಳು. ಎರಡು ಪೇಪರ್ಗಳನ್ನು ಬರ್ನಿ ಬರೆದಿದ್ದಾರೆ (ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009b; ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009a), ಕೃಷಿ ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಂಶೋಧನೆಯ ಮೇಲೆ ಅವರ ಗಮನಾರ್ಹ ಪ್ರಭಾವವನ್ನು ಒತ್ತಿಹೇಳುತ್ತದೆ. ಝಾರ್ಕೊ-ತೇಜಡಾ ಮತ್ತು ಇತರರಿಂದ ಪತ್ರಿಕೆ. (2014) ಮರದ ಎತ್ತರದ ಪ್ರಮಾಣೀಕರಣದಲ್ಲಿ ಕಡಿಮೆ-ವೆಚ್ಚದ UAV ಚಿತ್ರಣವನ್ನು ಬಳಸುವ ಅಗತ್ಯವನ್ನು ವಿವರಿಸಲು ಪ್ರವರ್ತಕ ಅಧ್ಯಯನಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ಹೆಚ್ಚು ಉಲ್ಲೇಖಿತ ಪ್ರಕಟಣೆಗಳ ಪಟ್ಟಿ.
| ಶ್ರೇಣಿ | 1990 ನಿಂದ 2010 ಗೆ | 2011 ನಿಂದ 2021 ಗೆ | ||
| ಡಾಕ್ಯುಮೆಂಟ್ | ಉಲ್ಲೇಖಗಳು | ಡಾಕ್ಯುಮೆಂಟ್ | ಉಲ್ಲೇಖಗಳು | |
| 1 | (ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009b) | 831 | (ಸಿ. ಜಾಂಗ್ & ಕೊವಾಕ್ಸ್, 2012) | 967 |
| 2 | (ಆಸ್ಟಿನ್, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (ಹಂಟ್ ಮತ್ತು ಇತರರು, 2010) | 331 | (ಫ್ಲೋರೆನೋ & ವುಡ್, 2015) | 552 |
| 4 | (SR ಹರ್ವಿಟ್ಜ್ ಮತ್ತು ಇತರರು., 2004) | 285 | (ಹೊಸೈನ್ ಮೊಟ್ಲಾಗ್ ಮತ್ತು ಇತರರು., 2016) | 391 |
| 5 | (CCD ಲೆಲಾಂಗ್ ಮತ್ತು ಇತರರು., 2008) | 272 | (ಶಾಖತ್ರೆ ಮತ್ತು ಇತರರು., 2019) | 383 |
| 6 | (ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009b) | 250 | (ಮಾ ಮತ್ತು ಇತರರು, 2017) | 373 |
| 7 | (ಗ್ರೆನ್ಜ್ಡೋರ್ಫರ್ ¨ ಮತ್ತು ಇತರರು., 2008) | 198 | (ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು, 2014) | 360 |
| 8 | (ಹ್ರಾಬರ್ ಮತ್ತು ಇತರರು, 2005) | 175 | (ಜಾರ್ಕೊ-ತೇಜಾಡಾ ಮತ್ತು ಇತರರು., 2014) | 347 |
| 9 | (Y. ಹುವಾಂಗ್ ಮತ್ತು ಇತರರು, 2009) | 129 | (Ad˜ ao ಮತ್ತು ಇತರರು, 2017) | 335 |
| 10 | (Schmale III ಮತ್ತು ಇತರರು., 2008) | 119 | (ಹೊಂಕವಾರ ಮತ್ತು ಇತರರು, 2013a) | 331 |
| 11 | (ಅಬ್ದ್-ಎಲ್ರಹ್ಮಾನ್ ಮತ್ತು ಇತರರು., 2005) | 79 | (ಕ್ಯಾಂಡಿಯಾಗೊ ಮತ್ತು ಇತರರು, 2015) | 327 |
| 12 | (ಟೆಕ್ಕಿ ಮತ್ತು ಇತರರು, 2010) | 69 | (ಕ್ಸಿಯಾಂಗ್ & ಟಿಯಾನ್, 2011) | 307 |
| 13 | (ಸುಲ್ಲಿವಾನ್ ಮತ್ತು ಇತರರು, 2007) | 51 | (ಮೇಟ್ಸೆ ಮತ್ತು ಇತರರು, 2015) | 303 |
| 14 | (ಲುಮ್ಮೆ ಮತ್ತು ಇತರರು, 2008) | 42 | (ಗಾಗೋ ಮತ್ತು ಇತರರು, 2015) | 275 |
| 15 | (ಗೊಕ್ಟೊ ¨ ǧan et al., 2010) | 40 | (ಆಸೆನ್ ಮತ್ತು ಇತರರು, 2015a) | 269 |
ಎರಡನೇ ಅವಧಿಯಲ್ಲಿ (2011–2021), Zhang and Kovacs (2012) ಮತ್ತು Nex and Remondino (2014) ಅವರ ಸಂಶೋಧನೆಯು ಹೆಚ್ಚಾಗಿ ಉಲ್ಲೇಖಿಸಲಾದ ಪ್ರಕಟಣೆಗಳಿಗೆ ಕಾರಣವಾಯಿತು. Zhang and Kovacs (2012) ವಾದಿಸುತ್ತಾರೆ ನಿಖರವಾದ ಕೃಷಿಯು ಭೌಗೋಳಿಕ ಮಾಹಿತಿ ವ್ಯವಸ್ಥೆಗಳು, GPS ಮತ್ತು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನಂತಹ ಭೌಗೋಳಿಕ ತಂತ್ರಗಳು ಮತ್ತು ಸಂವೇದಕಗಳನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುವುದರಿಂದ ಕ್ಷೇತ್ರದಲ್ಲಿನ ವ್ಯತ್ಯಾಸಗಳನ್ನು ಸೆರೆಹಿಡಿಯಲು ಮತ್ತು ಪರ್ಯಾಯ ತಂತ್ರಗಳನ್ನು ಬಳಸಿಕೊಳ್ಳುವ ಮೂಲಕ ಅವುಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಪ್ರಯೋಜನವನ್ನು ಪಡೆಯಬಹುದು. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಆಟದ ಬದಲಾವಣೆಯಾಗಿ, ಡ್ರೋನ್ಗಳ ಅಳವಡಿಕೆಯು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್, ವೈಮಾನಿಕ ವೀಕ್ಷಣೆಯನ್ನು ಸರಳಗೊಳಿಸುವುದು, ಬೆಳೆ ಬೆಳವಣಿಗೆಯ ದತ್ತಾಂಶ, ಮಣ್ಣಿನ ಪರಿಸ್ಥಿತಿಗಳು ಮತ್ತು ಸಿಂಪರಣೆ ಪ್ರದೇಶಗಳನ್ನು ಸೆರೆಹಿಡಿಯುವಲ್ಲಿ ಹೊಸ ಯುಗಕ್ಕೆ ನಾಂದಿ ಹಾಡಿದೆ. Zhang ಮತ್ತು Kovacs (2012) ನ ವಿಮರ್ಶೆಯು ಮೂಲಭೂತವಾಗಿದೆ ಏಕೆಂದರೆ ಇದು UAV ಗಳ ಬಗ್ಗೆ ಒಳನೋಟಗಳನ್ನು ನೀಡುತ್ತದೆ ಏಕೆಂದರೆ ಇದು ಪರಿಸರದ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಈ ಸಾಧನಗಳ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಬಳಕೆಗಳು ಮತ್ತು ಸವಾಲುಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ, ಉದಾಹರಣೆಗೆ ಪ್ಲಾಟ್ಫಾರ್ಮ್ ಮತ್ತು ಕ್ಯಾಮೆರಾ ಮಿತಿಗಳು, ಡೇಟಾ ಸಂಸ್ಕರಣಾ ಸವಾಲುಗಳು, ರೈತರ ನಿಶ್ಚಿತಾರ್ಥ ಮತ್ತು ವಾಯುಯಾನ ನಿಯಮಗಳು. . ಎರಡನೆಯದು
Nex ಮತ್ತು Remondino (2014) ನಿಂದ ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಲಾದ ಅಧ್ಯಯನವು ಭೂಮಿಯ ಚಿತ್ರಗಳನ್ನು ಸೆರೆಹಿಡಿಯಲು, ಸಂಸ್ಕರಿಸಲು ಮತ್ತು ವಿಶ್ಲೇಷಿಸಲು UAV ಗಳ ಕಲೆಯ ಸ್ಥಿತಿಯನ್ನು ಪರಿಶೀಲಿಸಿದೆ.
ಅವರ ಕೆಲಸವು ಹಲವಾರು UAV ಪ್ಲಾಟ್ಫಾರ್ಮ್ಗಳು, ಅಪ್ಲಿಕೇಶನ್ಗಳು ಮತ್ತು ಬಳಕೆಯ ಪ್ರಕರಣಗಳ ಅವಲೋಕನವನ್ನು ಪ್ರಸ್ತುತಪಡಿಸಿತು, UAV ಇಮೇಜ್ ಪ್ರೊಸೆಸಿಂಗ್ನಲ್ಲಿನ ಹೊಸ ಪ್ರಗತಿಗಳನ್ನು ಪ್ರದರ್ಶಿಸುತ್ತದೆ. ಕೃಷಿಯಲ್ಲಿ, ರೈತರು ವೆಚ್ಚ ಮತ್ತು ಸಮಯದ ಉಳಿತಾಯವನ್ನು ಸಾಧಿಸಲು ಪರಿಣಾಮಕಾರಿ ನಿರ್ಧಾರಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳಲು UAV ಗಳನ್ನು ಬಳಸಬಹುದು, ಹಾನಿಗಳ ತ್ವರಿತ ಮತ್ತು ನಿಖರವಾದ ದಾಖಲೆಯನ್ನು ಪಡೆದುಕೊಳ್ಳಬಹುದು ಮತ್ತು ಸಂಭವನೀಯ ಸಮಸ್ಯೆಗಳನ್ನು ನಿರೀಕ್ಷಿಸಬಹುದು. ಸಾಂಪ್ರದಾಯಿಕ ವೈಮಾನಿಕ ಪ್ಲಾಟ್ಫಾರ್ಮ್ಗಳಿಗೆ ವ್ಯತಿರಿಕ್ತವಾಗಿ, UAV ಗಳು ಕಾರ್ಯಾಚರಣೆಯ ವೆಚ್ಚಗಳನ್ನು ಕಡಿತಗೊಳಿಸಬಹುದು ಮತ್ತು ಹೆಚ್ಚಿನ ನಿಖರತೆಯ ಸಾಮರ್ಥ್ಯವನ್ನು ಸಂರಕ್ಷಿಸುವಾಗ ಕಠಿಣ ಸ್ಥಳಗಳಲ್ಲಿ ಪ್ರವೇಶದ ಅಪಾಯವನ್ನು ಕಡಿಮೆ ಮಾಡಬಹುದು. ಅವರ ಕಾಗದವು UAV ಗಳ ವಿವಿಧ ಪ್ರಯೋಜನಗಳನ್ನು ಸಾರಾಂಶಗೊಳಿಸುತ್ತದೆ, ನಿರ್ದಿಷ್ಟವಾಗಿ ನಿಖರತೆ ಮತ್ತು ನಿರ್ಣಯದ ವಿಷಯದಲ್ಲಿ.
2011 ಮತ್ತು 2021 ರ ನಡುವೆ ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಲಾದ ಉಳಿದ ಹದಿಮೂರು ಪ್ರಕಟಣೆಗಳಲ್ಲಿ, ಇಮೇಜಿಂಗ್ ಮಿಷನ್ಗಳಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಸಂಶೋಧನೆಯ ಮೇಲೆ ಹೆಚ್ಚಿನ ಸಾಂದ್ರತೆಯನ್ನು ನಾವು ಗಮನಿಸಿದ್ದೇವೆ (ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು, 2014; ಮಾ ಮತ್ತು ಇತರರು, 2017; ಜರ್ಕೊ-ತೇಜಾಡಾ ಮತ್ತು ಇತರರು., 2014). , ನಿಖರವಾದ ಕೃಷಿ (ಕ್ಯಾಂಡಿಯಾಗೊ ಮತ್ತು ಇತರರು, 2015; ಹೊಂಕಾವಾರಾ ಮತ್ತು ಇತರರು, 2013a), ನಿಖರವಾದ ದ್ರಾಕ್ಷಾರಸ (ಮ್ಯಾಟೆಸ್ ಮತ್ತು ಇತರರು, 2015), ನೀರಿನ ಒತ್ತಡ ಮೌಲ್ಯಮಾಪನ (ಗಾಗೊ ಮತ್ತು ಇತರರು, 2015), ಮತ್ತು ಸಸ್ಯವರ್ಗದ ಮೇಲ್ವಿಚಾರಣೆ (ಆಸೆನ್. , 2015a). ಆರಂಭಿಕ ವರ್ಷಗಳಲ್ಲಿ, ಸಂಶೋಧಕರು ಗಮನಹರಿಸಿದರು
ಕೃಷಿಗಾಗಿ ಕಡಿಮೆ-ವೆಚ್ಚದ, ಹಗುರವಾದ ಮತ್ತು ನಿಖರವಾದ UAV-ಆಧಾರಿತ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವುದರ ಕುರಿತು ಇನ್ನಷ್ಟು; ಇತ್ತೀಚಿನ ಸಂಶೋಧನೆಯು ಕೃಷಿ ಮತ್ತು ಕ್ಷೇತ್ರ ಸಮೀಕ್ಷೆಗಾಗಿ UAV ಅಪ್ಲಿಕೇಶನ್ಗಳ ವಿಮರ್ಶೆಗಳ ಮೇಲೆ ಹೆಚ್ಚು ಗಮನಹರಿಸಿದೆ. ಸಾರಾಂಶದಲ್ಲಿ, UAV ಗಳ ಪ್ರಸ್ತುತ ವೈಜ್ಞಾನಿಕ ಮತ್ತು ತಾಂತ್ರಿಕ ಸ್ಥಿತಿಯನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲು ಪ್ರಭಾವಶಾಲಿ ಪ್ರಕಟಣೆಗಳು ಪೂರ್ವ ಅಧ್ಯಯನಗಳ ವಿಮರ್ಶೆಗಳನ್ನು ಒದಗಿಸಿವೆ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಯನ್ನು ಬೆಂಬಲಿಸಲು UAV ವ್ಯವಸ್ಥೆಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾಗಿದೆ ಎಂದು ಈ ವಿಶ್ಲೇಷಣೆಯು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. ಕುತೂಹಲಕಾರಿಯಾಗಿ, ಪ್ರಾಯೋಗಿಕವಾಗಿ ಕೆಲಸ ಮಾಡುವ ಅಧ್ಯಯನಗಳನ್ನು ನಾವು ಕಂಡುಕೊಂಡಿಲ್ಲ
ವಿಧಾನಗಳು ಅಥವಾ ವಿವರಣಾತ್ಮಕ ಅಧ್ಯಯನಗಳು, ಇದು ಗಮನಾರ್ಹವಾದ ಜ್ಞಾನದ ಅಂತರವನ್ನು ರೂಪಿಸುತ್ತದೆ ಮತ್ತು ಈ ವಿಷಯದ ಕುರಿತು ಹೆಚ್ಚಿನ ಸಂಶೋಧನೆಗೆ ಕರೆ ನೀಡುತ್ತದೆ.
ಸಹ ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆ
Gmür (2006) ಪ್ರಕಾರ, ಸಹ-ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ಒಂದೇ ರೀತಿಯ ಪ್ರಕಟಣೆಗಳನ್ನು ಗುರುತಿಸುತ್ತದೆ ಮತ್ತು ಅವುಗಳನ್ನು ಕ್ಲಸ್ಟರ್ ಮಾಡುತ್ತದೆ. ಕ್ಲಸ್ಟರ್ ಅನ್ನು ಎಚ್ಚರಿಕೆಯಿಂದ ಪರೀಕ್ಷಿಸುವುದು ಪ್ರಕಟಣೆಗಳ ನಡುವೆ ಸಂಶೋಧನೆಯ ಸಾಮಾನ್ಯ ಕ್ಷೇತ್ರವನ್ನು ಬಹಿರಂಗಪಡಿಸಬಹುದು. ಸಂಬಂಧಿತ ವಿಷಯ ಪ್ರದೇಶಗಳನ್ನು ವಿವರಿಸಲು ಮತ್ತು ಪ್ರಕಟಣೆಗಳ ಬೌದ್ಧಿಕ ಮಾದರಿಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಕೃಷಿ ಡ್ರೋನ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ಸಾಹಿತ್ಯದ ಸಹ-ಉಲ್ಲೇಖವನ್ನು ನಾವು ತನಿಖೆ ಮಾಡುತ್ತೇವೆ. ಈ ನಿಟ್ಟಿನಲ್ಲಿ, ಸ್ಮಾಲ್ (1973) ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಮತ್ತು ಮೂಲ ಸಂಶೋಧನೆಯನ್ನು ಅಧ್ಯಯನ ಮಾಡಲು ಕೋಸಿಟೇಶನ್ ವಿಶ್ಲೇಷಣೆಯ ಬಳಕೆಯನ್ನು ಶಿಫಾರಸು ಮಾಡಿದೆ
ಒಂದು ಶಿಸ್ತಿನೊಳಗೆ. ಸೆಟ್ ಅನ್ನು ಅತ್ಯಂತ ಮೂಲ ಲೇಖನಗಳಿಗೆ ಸೀಮಿತಗೊಳಿಸಲು (ಗೋಯಲ್ ಮತ್ತು ಕುಮಾರ್, 2021), ನಾವು 25 ರ ಸಹ-ಉಲ್ಲೇಖದ ಮಿತಿಯನ್ನು ಹೊಂದಿಸಿದ್ದೇವೆ, ಅಂದರೆ 25 ಅಥವಾ ಹೆಚ್ಚಿನ ವಿಭಿನ್ನ ಪ್ರಕಟಣೆಗಳ ಉಲ್ಲೇಖ ಪಟ್ಟಿಗಳಲ್ಲಿ ಎರಡು ಲೇಖನಗಳನ್ನು ಒಟ್ಟಿಗೆ ಉಲ್ಲೇಖಿಸಿರಬೇಕು. ಕ್ಲಸ್ಟರಿಂಗ್ ಅನ್ನು ಕನಿಷ್ಠ ಕ್ಲಸ್ಟರ್ ಗಾತ್ರ 1 ರೊಂದಿಗೆ ನಡೆಸಲಾಯಿತು ಮತ್ತು ಸಣ್ಣ ಕ್ಲಸ್ಟರ್ಗಳನ್ನು ದೊಡ್ಡದರೊಂದಿಗೆ ವಿಲೀನಗೊಳಿಸುವ ಯಾವುದೇ ವಿಧಾನವಿಲ್ಲದೆ ನಡೆಸಲಾಯಿತು. ಪರಿಣಾಮವಾಗಿ, ಅಧ್ಯಯನಗಳ ಹೋಲಿಕೆ ಮತ್ತು ಅವುಗಳ ಬೌದ್ಧಿಕ ರಚನೆಯ ಆಧಾರದ ಮೇಲೆ ಆರು ಸಮೂಹಗಳನ್ನು ರಚಿಸಲಾಗಿದೆ. ಪ್ರತಿ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳ ವಿತರಣೆಯನ್ನು ಕೋಷ್ಟಕ 6 ತೋರಿಸುತ್ತದೆ.
ಕ್ಲಸ್ಟರ್ 1: ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿ ಪ್ರಕಟವಾದ ಹದಿನೆಂಟು ದಾಖಲೆಗಳನ್ನು ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ಪರಿಸರ ಮೇಲ್ವಿಚಾರಣೆ, ಬೆಳೆ ನಿರ್ವಹಣೆ ಮತ್ತು ಕಳೆ ನಿರ್ವಹಣೆಯನ್ನು ಬೆಂಬಲಿಸುವಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಪಾತ್ರವನ್ನು ಚರ್ಚಿಸುತ್ತವೆ. ಉದಾಹರಣೆಗೆ, ಮ್ಯಾನ್ಫ್ರೆಡಾ ಮತ್ತು ಇತರರು. (2018) ನೈಸರ್ಗಿಕ ಕೃಷಿ ಪರಿಸರ ವ್ಯವಸ್ಥೆಯ ಮೇಲ್ವಿಚಾರಣೆಯಲ್ಲಿ UAV ಯ ಪ್ರಸ್ತುತ ಸಂಶೋಧನೆ ಮತ್ತು ಅನುಷ್ಠಾನಗಳ ಅವಲೋಕನವನ್ನು ಒದಗಿಸುತ್ತದೆ ಮತ್ತು ತಂತ್ರಜ್ಞಾನವು ಪರಿಸರದ ಮೇಲ್ವಿಚಾರಣೆಯನ್ನು ತೀವ್ರವಾಗಿ ಹೆಚ್ಚಿಸಲು ಮತ್ತು ಕಡಿಮೆ ಮಾಡಲು ಪ್ರಚಂಡ ಸಾಮರ್ಥ್ಯವನ್ನು ನೀಡುತ್ತದೆ ಎಂದು ವಾದಿಸುತ್ತಾರೆ.
ಕ್ಷೇತ್ರ ವೀಕ್ಷಣೆ ಮತ್ತು ಸಾಂಪ್ರದಾಯಿಕ ಗಾಳಿ ಮತ್ತು ಬಾಹ್ಯಾಕಾಶದ ದೂರಸಂವೇದಿ ನಡುವೆ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಅಂತರ. ಸುಧಾರಿತ ತಾತ್ಕಾಲಿಕ ಮರುಪಡೆಯುವಿಕೆಗಾಗಿ ಹೊಸ ಸಾಮರ್ಥ್ಯವನ್ನು ನೀಡುವ ಮೂಲಕ ಮತ್ತು ಕೈಗೆಟುಕುವ ರೀತಿಯಲ್ಲಿ ದೊಡ್ಡ ಪ್ರದೇಶಗಳಿಗೆ ಪ್ರಾದೇಶಿಕ ಒಳನೋಟಗಳನ್ನು ನೀಡುವ ಮೂಲಕ ಇದನ್ನು ಮಾಡಬಹುದು. UAV ಗಳು ನಿರಂತರವಾಗಿ ಪರಿಸರವನ್ನು ಗ್ರಹಿಸಬಹುದು ಮತ್ತು ಪರಿಣಾಮವಾಗಿ ಡೇಟಾವನ್ನು ಬುದ್ಧಿವಂತ, ಕೇಂದ್ರೀಕೃತ/ವಿಕೇಂದ್ರೀಕೃತ ಘಟಕಗಳಿಗೆ ಕಳುಹಿಸಬಹುದು, ಇದು ರೋಗ ಅಥವಾ ನೀರಿನ ಪತ್ತೆಯ ಕೊರತೆಯಂತಹ ಅಂತಿಮವಾಗಿ ಸಮಸ್ಯೆಗಳನ್ನು ಗುರುತಿಸಲು ಸಂವೇದಕಗಳನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ (ಪಡುವಾ ´ et al., 2017). ಅಡಾವೊ ˜ ಮತ್ತು ಇತರರು. (2017) UAV ಗಳು ನೀರಿನ ಸ್ಥಿತಿ, ಜೀವರಾಶಿ ಅಂದಾಜು ಮತ್ತು ಶಕ್ತಿಯ ಮೌಲ್ಯಮಾಪನಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ಬೃಹತ್ ಪ್ರಮಾಣದ ಕಚ್ಚಾ ದತ್ತಾಂಶವನ್ನು ಸೆರೆಹಿಡಿಯುವ ಮೂಲಕ ಸಸ್ಯಗಳ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ನಿರ್ಣಯಿಸಲು ಸೂಕ್ತವಾಗಿದೆ. UAV-ಮೌಂಟೆಡ್ ಸಂವೇದಕಗಳನ್ನು ರಿಮೋಟ್-ಸೆನ್ಸಿಂಗ್ ಡೇಟಾವನ್ನು ಸಮಯೋಚಿತವಾಗಿ ಸೆರೆಹಿಡಿಯಲು ಸರಿಯಾದ ಪರಿಸರ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ತ್ವರಿತವಾಗಿ ನಿಯೋಜಿಸಬಹುದು (ವಾನ್ ಬ್ಯೂರೆನ್ ಮತ್ತು ಇತರರು, 2015). UAV ಗಳ ಮೂಲಕ, ರೈತರು ಒಳಾಂಗಣ ಕೃಷಿ ಪರಿಸರದ (ಉದಾಹರಣೆಗೆ, ಹಸಿರುಮನೆಗಳು) ಮೂರು ಆಯಾಮದ ಜಾಗದಲ್ಲಿ ಪ್ರಾಯೋಗಿಕವಾಗಿ ಯಾವುದೇ ಸ್ಥಳದಿಂದ ಮಾಪನಗಳನ್ನು ಪಡೆದುಕೊಳ್ಳುವ ಮೂಲಕ ಒಳಾಂಗಣ ಕೃಷಿ ಚಟುವಟಿಕೆಗಳನ್ನು ಕೈಗೊಳ್ಳಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಸ್ಥಳೀಯ ಹವಾಮಾನ ನಿಯಂತ್ರಣ ಮತ್ತು ಸಸ್ಯ ಮೇಲ್ವಿಚಾರಣೆಯನ್ನು ಖಾತ್ರಿಪಡಿಸಿಕೊಳ್ಳಬಹುದು (ರೋಲ್ಡನ್ ಎಟ್ ಆಲ್). ., 2015). ನಿಖರತೆಯ ಸಂದರ್ಭದಲ್ಲಿ
ಕೃಷಿ, ಬೆಳೆ ನಿರ್ವಹಣಾ ನಿರ್ಧಾರಗಳು ಸೂಕ್ತವಾದ ತಾತ್ಕಾಲಿಕ ಮತ್ತು ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ನೊಂದಿಗೆ ನಿಖರವಾದ, ವಿಶ್ವಾಸಾರ್ಹ ಬೆಳೆ ಡೇಟಾವನ್ನು ಅಗತ್ಯವಿದೆ (ಗೆಬ್ಬರ್ಸ್ & ಆಡಮ್ಚುಕ್, 2010; ಗೆವಾರ್ಟ್ ಮತ್ತು ಇತರರು, 2015; ಮೇಸ್ & ಸ್ಟೆಪ್ಪೆ, 2019). ಈ ಕಾರಣಕ್ಕಾಗಿ, Agüera Vega et al. (2015) ಯುಎವಿ-ಮೌಂಟೆಡ್ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಸೆನ್ಸಾರ್ ಸಿಸ್ಟಮ್ ಅನ್ನು ಬೆಳವಣಿಗೆಯ ಋತುವಿನಲ್ಲಿ ಸೂರ್ಯಕಾಂತಿ ಬೆಳೆಯ ಚಿತ್ರಗಳನ್ನು ಪಡೆಯಲು ಬಳಸಲಾಗಿದೆ. ಅಂತೆಯೇ, ಹುವಾಂಗ್ ಮತ್ತು ಇತರರು. (2009) UAV ಗಳನ್ನು ಆಧರಿಸಿದ ದೂರಸಂವೇದಿಯು ಸಂಗ್ರಹಿಸಿದ ಸ್ಪೆಕ್ಟ್ರಲ್ ಡೇಟಾದಿಂದ ಬೆಳೆಗಳು ಮತ್ತು ಮಣ್ಣಿನ ಮಾಪನವನ್ನು ಸುಲಭಗೊಳಿಸುತ್ತದೆ ಎಂಬುದನ್ನು ಗಮನಿಸಿ. ವರ್ಗರ್ ಮತ್ತು ಇತರರು. (2014) ಗೋಧಿ ಮತ್ತು ರಾಪ್ಸೀಡ್ ಬೆಳೆಗಳ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸುವ ನಿಖರವಾದ ಕೃಷಿ ಅನ್ವಯಗಳಲ್ಲಿ UAV ಪ್ರತಿಫಲನ ಮಾಪನಗಳಿಂದ ಹಸಿರು ಪ್ರದೇಶ ಸೂಚ್ಯಂಕ (GAI) ಅನ್ನು ಅಂದಾಜು ಮಾಡುವ ತಂತ್ರವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾಗಿದೆ ಮತ್ತು ಪರೀಕ್ಷಿಸಲಾಗಿದೆ. ಆದ್ದರಿಂದ, ಡ್ರೋನ್ಗಳು ಆಗಾಗ್ಗೆ ಮರುಭೇಟಿಗಳು ಮತ್ತು ಹೆಚ್ಚಿನ ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ನೊಂದಿಗೆ ಬೆಳೆ ಸ್ಥಿತಿಯ ಮಾಹಿತಿಯನ್ನು ಹಿಂಪಡೆಯಲು ಹೊಸ ಸಾಧ್ಯತೆಗಳನ್ನು ಒದಗಿಸುತ್ತವೆ (ಡಾಂಗ್ ಮತ್ತು ಇತರರು, 2019; ಗಾರ್ಜೋನಿಯೊ ಮತ್ತು ಇತರರು, 2017; ಎಚ್. ಝೆಂಗ್ ಮತ್ತು ಇತರರು., 2016).
ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮೇಲೆ ಪ್ರಭಾವಶಾಲಿ ಪ್ರಕಟಣೆಗಳ ಕ್ಲಸ್ಟರಿಂಗ್.
| ಕ್ಲಸ್ಟರ್ | ವಿಶಾಲ ಥೀಮ್ | ಉಲ್ಲೇಖಗಳು |
| 1 | ಪರಿಸರ ಮೇಲ್ವಿಚಾರಣೆ, ಬೆಳೆ ನಿರ್ವಹಣೆ, ಕಳೆ ನಿರ್ವಹಣೆ | (Ad˜ ao ಮತ್ತು ಇತರರು, 2017; ಅಗುಯೆರಾ ವೇಗಾ ಮತ್ತು ಇತರರು, 2015; ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ ಮತ್ತು ಇತರರು, 2018; ಗೊಮೆಜ್-ಕ್ಯಾಂಡ್ ´ ಆನ್ ಎಟ್ ಆಲ್., 2014; ವೈ.ಬಿ ಹುವಾಂಗ್ ಮತ್ತು ಇತರರು, 2013; ಖನಾಲ್ ಮತ್ತು ಇತರರು., 2017; ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್, ´ 2011; ಮ್ಯಾನ್ಫ್ರೆಡಾ ಮತ್ತು ಇತರರು, 2018; ಪ ಅದುವಾ ಮತ್ತು ಇತರರು., 2017; ಪೆನಾ ˜ et al., 2013; ಪೆರೆಜ್-ಒರ್ಟಿಜ್ ಮತ್ತು ಇತರರು, 2015; ರಾಸ್ಮುಸ್ಸೆನ್ ಮತ್ತು ಇತರರು, 2013, 2016; ಟೊರೆಸ್-S´ ಆಂಚೆಜ್ ಮತ್ತು ಇತರರು, 2014; ಟೊರೆಸ್-ಸ್ಯಾಂಚೆಜ್, 'ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್,' & ಪೆನಾ, ˜ 2015; ವರ್ಗರ್ ಮತ್ತು ಇತರರು, 2014; ವಾನ್ ಬ್ಯೂರೆನ್ ಮತ್ತು ಇತರರು, 2015; C. ಜಾಂಗ್ & ಕೊವಾಕ್ಸ್, 2012) |
| 2 | ರಿಮೋಟ್ ಫಿನೋಟೈಪಿಂಗ್, ಇಳುವರಿ ಅಂದಾಜು, ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿ, ಸಸ್ಯಗಳ ಎಣಿಕೆ | (ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು, 2013, 2014; ಗೈಪೆಲ್ ಮತ್ತು ಇತರರು, 2014; ಗ್ನಾಡಿಂಗರ್ ¨ & ಸ್ಮಿಡಾಲ್ಟರ್, 2017; ಹಘಿಘಟ್ಟಲಬ್ ಮತ್ತು ಇತರರು, 2016; ಹಾಲ್ಮನ್ ಮತ್ತು ಇತರರು, 2016; ಜಿನ್ ಮತ್ತು ಇತರರು, 2017; W. ಲಿ ಮತ್ತು ಇತರರು, 2016; ಮೈಮೈತಿಜಿಯಾಂಗ್ ಮತ್ತು ಇತರರು, 2017; ಶಂಕರನ್ ಮತ್ತು ಇತರರು, 2015; ಸ್ಕಿರ್ಮನ್ ಮತ್ತು ಇತರರು, 2016; ಶಿ ಮತ್ತು ಇತರರು, 2016; ಯು ಮತ್ತು ಇತರರು, 2017; X. ಝೌ ಮತ್ತು ಇತರರು, 2017) |
| 3 | ನೀರಿಗಾಗಿ ಥರ್ಮಲ್ ಇಮೇಜಿಂಗ್, ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ | (ಬಲುಜಾ ಮತ್ತು ಇತರರು, 2012; ಬರ್ನಿ ಮತ್ತು ಇತರರು., 2009b; ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009a; ಕ್ಯಾಂಡಿಯಾಗೊ ಮತ್ತು ಇತರರು, 2015; ಗಾಗೋ ಮತ್ತು ಇತರರು, 2015; ಗೊನ್ಜಾಲೆಜ್-ಡುಗೊ ಮತ್ತು ಇತರರು, 2013, 2014; ಗ್ರೆನ್ಜ್ಡಾರ್ಫರ್ ¨ ಮತ್ತು ಇತರರು, 2008; ಖಾಲಿಕ್ ಮತ್ತು ಇತರರು, 2019; ಮೇಟ್ಸೆ ಮತ್ತು ಇತರರು, 2015; ರಿಬೇರೊ-ಗೋಮ್ಸ್ ಮತ್ತು ಇತರರು, 2017; Santesteban et al., 2017; ಯುಟೊ ಮತ್ತು ಇತರರು., 2013) |
| 4 | ಹೈಪರ್ಸೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್, ಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಣ | (ಆಸೆನ್ ಮತ್ತು ಇತರರು, 2015a; ಬರೆತ್ ಮತ್ತು ಇತರರು., 2015; ಹಕಲಾ ಮತ್ತು ಇತರರು, 2013; Honkavaara et al., 2013a; ಲೂಸಿಯರ್ ಮತ್ತು ಇತರರು, 2014; ಸಾರಿ ಮತ್ತು ಇತರರು, 2011; ಸುವೊಮಲೈನೆನ್ ಮತ್ತು ಇತರರು, 2014) |
| 5 | 3D-ಮ್ಯಾಪಿಂಗ್ ಅಪ್ಲಿಕೇಶನ್ಗಳು | (ಜಿಮೆನೆಜ್-ಬ್ರೆನೆಸ್ ಮತ್ತು ಇತರರು, 2017; ನೆಕ್ಸ್ & ರೆಮೊಂಡಿನೊ, 2014; ಸಲಾಮಿ ಮತ್ತು ಇತರರು., 2014; ಟೊರೆಸ್-S´ ಆಂಚೆಜ್, ಲೋಪೆಜ್-' ಗ್ರಾನಡೋಸ್, ಸೆರಾನೋ, ಮತ್ತು ಇತರರು, 2015; ಜಹಾವಿ ಮತ್ತು ಇತರರು, 2015; ಝಾರ್ಕೊ-ತೇಜಡಾ ಇತರರು, 2014) |
| 6 | ಕೃಷಿ ಕಣ್ಗಾವಲು | (SR ಹರ್ವಿಟ್ಜ್ ಮತ್ತು ಇತರರು, 2004; ಹಂಟ್ ಮತ್ತು ಇತರರು, 2010; CCD ಲೆಲಾಂಗ್ ಮತ್ತು ಇತರರು., 2008; ಪ್ರಿಮಿಸೆರಿಯೊ ಮತ್ತು ಇತರರು, 2012; ಕ್ಸಿಯಾಂಗ್ & ಟಿಯಾನ್, 2011) |
ಇದಲ್ಲದೆ, ಕಳೆ ಮ್ಯಾಪಿಂಗ್ ಸೇರಿದಂತೆ ಕೃಷಿಯಲ್ಲಿ ಸವಾಲಿನ ಕಾರ್ಯಗಳಿಗೆ ಡ್ರೋನ್ಗಳು ಉಪಯುಕ್ತವಾಗಿವೆ. ಸಾಧನಗಳಿಂದ ಸೆರೆಹಿಡಿಯಲಾದ ಚಿತ್ರಗಳು ಹೊಲಗಳಲ್ಲಿ ಆರಂಭಿಕ ಕಳೆ ಪತ್ತೆಗೆ ತಮ್ಮ ಉಪಯುಕ್ತತೆಯನ್ನು ಸಾಬೀತುಪಡಿಸಿವೆ (ಡಿ ಕ್ಯಾಸ್ಟ್ರೊ ಮತ್ತು ಇತರರು, 2018; ಜಿಮೆನೆಜ್-ಬ್ರೆನೆಸ್ ಮತ್ತು ಇತರರು., 2017; ಲ್ಯಾಮ್ ಮತ್ತು ಇತರರು, 2021; ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್ ಮತ್ತು ಇತರರು., 2016; ರೋಜೆನ್ಬರ್ಗ್ ಮತ್ತು ಇತರರು, 2021). ಈ ನಿಟ್ಟಿನಲ್ಲಿ, ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ ಮತ್ತು ಇತರರು. (2018) ಯುಎವಿ ಚಿತ್ರಣ ಮತ್ತು ಆಬ್ಜೆಕ್ಟ್-ಬೇಸ್ಡ್ ಇಮೇಜ್ ಅನಾಲಿಸಿಸ್ (ಒಬಿಐಎ) ವಿಲೀನವು ಆರಂಭಿಕ ಋತುವಿನ ಹುಲ್ಲುಗಾವಲು ಬೆಳೆಗಳಲ್ಲಿ ಆರಂಭಿಕ ಪತ್ತೆಹಚ್ಚುವಿಕೆಯನ್ನು ಸ್ವಯಂಚಾಲಿತಗೊಳಿಸುವ ಸಮಸ್ಯೆಯನ್ನು ನಿವಾರಿಸಲು ವೈದ್ಯರಿಗೆ ಅನುವು ಮಾಡಿಕೊಟ್ಟಿದೆ, ಇದು ಕಳೆ ಸಂಶೋಧನೆಯಲ್ಲಿ ದೊಡ್ಡ ಹೆಜ್ಜೆಯಾಗಿದೆ. ಅಂತೆಯೇ, ಪೆನಾ ˜ et al. (2013) OBIA ಕಾರ್ಯವಿಧಾನದೊಂದಿಗೆ UAV ಯಿಂದ ಅಲ್ಟ್ರಾ-ಹೈ ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಗಳ ಬಳಕೆಯು ಆರಂಭಿಕ ಮೆಕ್ಕೆ ಜೋಳದ ಬೆಳೆಗಳಲ್ಲಿ ಕಳೆ ನಕ್ಷೆಗಳನ್ನು ರಚಿಸಲು ಸಾಧ್ಯವಾಗುವಂತೆ ಮಾಡುತ್ತದೆ, ಇದನ್ನು ಋತುವಿನ ಕಳೆ ನಿಯಂತ್ರಣ ಕ್ರಮಗಳ ಅನುಷ್ಠಾನವನ್ನು ಯೋಜಿಸಲು ಬಳಸಬಹುದು, ಉಪಗ್ರಹ ಮತ್ತು ಸಾಂಪ್ರದಾಯಿಕ ವಾಯುಗಾಮಿ ಚಿತ್ರಗಳ ಸಾಮರ್ಥ್ಯವನ್ನು ಮೀರಿದ ಕಾರ್ಯ. ಚಿತ್ರದ ವರ್ಗೀಕರಣ ಅಥವಾ ವಸ್ತು ಪತ್ತೆ ಕ್ರಮಾವಳಿಗಳಿಗೆ ಹೋಲಿಸಿದರೆ, ಕಳೆ ಮ್ಯಾಪಿಂಗ್ ಕಾರ್ಯಗಳಲ್ಲಿ (ಜೆ. ಡೆಂಗ್ ಮತ್ತು ಇತರರು, 2020) ಲಾಕ್ಷಣಿಕ ವಿಭಜನಾ ತಂತ್ರಗಳು ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿಯಾಗಿವೆ, ಹೀಗಾಗಿ ರೈತರು ಕ್ಷೇತ್ರದ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು, ನಷ್ಟವನ್ನು ತಗ್ಗಿಸಲು ಮತ್ತು ಬೆಳವಣಿಗೆಯ ಋತುವಿನ ಉದ್ದಕ್ಕೂ ಇಳುವರಿಯನ್ನು ಸುಧಾರಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ (ರಮೇಶ್ ಮತ್ತು ಇತರರು, 2020). ಆಳವಾದ ಕಲಿಕೆ ಆಧಾರಿತ ಶಬ್ದಾರ್ಥದ ವಿಭಾಗವು ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ವೈಮಾನಿಕ ಚಿತ್ರಗಳಿಂದ ಸಸ್ಯವರ್ಗದ ಹೊದಿಕೆಯ ನಿಖರವಾದ ಮಾಪನವನ್ನು ಒದಗಿಸುತ್ತದೆ (ರಮೇಶ್ ಮತ್ತು ಇತರರು, 2020; ಎ. ಝೆಂಗ್ ಮತ್ತು ಇತರರು., 2022). ರಿಮೋಟ್ಗೆ ಅವರ ಸಾಮರ್ಥ್ಯದ ಹೊರತಾಗಿಯೂ
ಸೆನ್ಸಿಂಗ್ ಪಿಕ್ಸೆಲ್ ವರ್ಗೀಕರಣ, ಲಾಕ್ಷಣಿಕ ವಿಭಜನಾ ತಂತ್ರಗಳಿಗೆ ಗಮನಾರ್ಹವಾದ ಗಣನೆ ಮತ್ತು ನಿಷೇಧಿತವಾಗಿ ಹೆಚ್ಚಿನ GPU ಮೆಮೊರಿಯ ಅಗತ್ಯವಿರುತ್ತದೆ (J. ಡೆಂಗ್ ಮತ್ತು ಇತರರು, 2020).
ಯಂತ್ರ ಕಲಿಕೆ ಮತ್ತು UAV ಆಧಾರದ ಮೇಲೆ, P´erez-Ortiz et al. (2015) ರೈತರು ಆರಂಭಿಕ-ನಂತರದ ಕಳೆ ನಿಯಂತ್ರಣವನ್ನು ಅಳವಡಿಸಿಕೊಂಡಾಗ ಸೈಟ್-ನಿರ್ದಿಷ್ಟ ಕಳೆ ನಿಯಂತ್ರಣ ತಂತ್ರಗಳನ್ನು ಒದಗಿಸಲು ಕಳೆ ಮ್ಯಾಪಿಂಗ್ ವಿಧಾನವನ್ನು ಸೂಚಿಸಿದ್ದಾರೆ. ಅಂತಿಮವಾಗಿ, ರಾಸ್ಮುಸ್ಸೆನ್ ಮತ್ತು ಇತರರು. (2013) ಡ್ರೋನ್ಗಳು ಉತ್ತಮ ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ ನಮ್ಯತೆಯೊಂದಿಗೆ ಅಗ್ಗದ ಸಂವೇದನೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ ಎಂದು ಹೈಲೈಟ್ ಮಾಡಿದೆ. ಒಟ್ಟಾರೆಯಾಗಿ, ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್, ಕ್ರಾಪ್ ಮಾನಿಟರಿಂಗ್ ಮತ್ತು ವೀಡ್ ಮ್ಯಾಪಿಂಗ್ ಅನ್ನು ಬೆಂಬಲಿಸಲು UAV ಗಳ ಸಂಭಾವ್ಯತೆಯನ್ನು ಅನ್ವೇಷಿಸುವುದರ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸುತ್ತವೆ. ಪರಿಸರ ಮೇಲ್ವಿಚಾರಣೆ, ಬೆಳೆ ನಿರ್ವಹಣೆ ಮತ್ತು ಕಳೆ ಮ್ಯಾಪಿಂಗ್ನಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳು ಹೆಚ್ಚು ಸಮರ್ಥನೀಯ ಕೃಷಿಯನ್ನು ಹೇಗೆ ಸಾಧಿಸಬಹುದು ಎಂಬುದನ್ನು ಮತ್ತಷ್ಟು ತನಿಖೆ ಮಾಡಲು ಹೆಚ್ಚುವರಿ ಆಳವಾದ ಸಂಶೋಧನೆ ಅಗತ್ಯವಿದೆ (ಚಾಮುವಾ & ಸಿಂಗ್, 2019; ಇಸ್ಲಾಂ ಮತ್ತು ಇತರರು, 2021; ಪೊಪೆಸ್ಕು ಮತ್ತು ಇತರರು., 2020; ಜೆ . ಸು, ಲಿಯು ಮತ್ತು ಇತರರು, 2018) ಮತ್ತು ಬೆಳೆ ವಿಮೆ ಅಪ್ಲಿಕೇಶನ್ಗಳಲ್ಲಿ ಈ ತಂತ್ರಜ್ಞಾನದ ಆಡಳಿತ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಿ (ಬಾಸ್ನೆಟ್ & ಬ್ಯಾಂಗ್, 2018; ಚಮುವಾ & ಸಿಂಗ್, 2019, 2022; ಮೈನೆನ್ & ರಾಬಿನ್ಸನ್, 2021). ಸಂಸ್ಕರಿಸಿದ ಡೇಟಾದ ಅಂತಿಮ ಗುಣಮಟ್ಟವನ್ನು ಹೆಚ್ಚಿಸಲು ಸಮರ್ಥ ಸಂಸ್ಕರಣಾ ತಂತ್ರಗಳೊಂದಿಗೆ UAV ಸಂಗ್ರಹಿಸಿದ ಅಳತೆಗಳನ್ನು ಮೌಲ್ಯೀಕರಿಸುವಲ್ಲಿ ಸಂಶೋಧಕರು ಗಮನಹರಿಸಬೇಕು (ಮ್ಯಾನ್ಫ್ರೆಡಾ ಮತ್ತು ಇತರರು, 2018). ಇದಲ್ಲದೆ, ಡಿಜಿಟಲ್ ಚಿತ್ರಗಳಲ್ಲಿ ಕಳೆಗಳನ್ನು ಪ್ರದರ್ಶಿಸುವ ಮತ್ತು UAV ವೀಡ್ ಮ್ಯಾಪಿಂಗ್ ಸಮಯದಲ್ಲಿ ಅಪ್ರಸ್ತುತ ಹಿನ್ನೆಲೆಯನ್ನು ತೊಡೆದುಹಾಕುವ ಪಿಕ್ಸೆಲ್ಗಳನ್ನು ಗುರುತಿಸುವ ಸೂಕ್ತವಾದ ಅಲ್ಗಾರಿದಮ್ಗಳ ಅಭಿವೃದ್ಧಿ ಅಗತ್ಯವಿದೆ (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; ಲೋಪೆಜ್- ಗ್ರಾನಾಡೋಸ್ ಮತ್ತು ಇತರರು, 2016). ಸಸ್ಯ ಗುರುತಿಸುವಿಕೆ, ಎಲೆಗಳ ವರ್ಗೀಕರಣ ಮತ್ತು ರೋಗದ ಮ್ಯಾಪಿಂಗ್ನಲ್ಲಿ ಲಾಕ್ಷಣಿಕ ವಿಭಜನಾ ತಂತ್ರಗಳ ಅಳವಡಿಕೆಯ ಕುರಿತು ಹೆಚ್ಚುವರಿ ಸಂಶೋಧನೆ ಸ್ವಾಗತಾರ್ಹ (ಫ್ಯುಯೆಂಟೆಸ್-ಪ್ಯಾಚೆಕೊ ಮತ್ತು ಇತರರು, 2019; ಕೆರ್ಕೆಚ್ ಮತ್ತು ಇತರರು., 2020).
ಕ್ಲಸ್ಟರ್ 2. ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಹಲವಾರು ಅಂಶಗಳ ಮೇಲೆ ಕೇಂದ್ರೀಕೃತವಾಗಿವೆ. ರಿಮೋಟ್ ಫಿನೋಟೈಪಿಂಗ್ಗೆ ಸಂಬಂಧಿಸಿದೆ, ಶಂಕರನ್ ಮತ್ತು ಇತರರು. (2015) ಕ್ಷೇತ್ರದಲ್ಲಿ ಬೆಳೆಗಳ ತ್ವರಿತ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ UAV ಗಳೊಂದಿಗೆ ಕಡಿಮೆ-ಎತ್ತರದ, ಹೆಚ್ಚಿನ-ರೆಸಲ್ಯೂಶನ್ ವೈಮಾನಿಕ ಚಿತ್ರಣವನ್ನು ಬಳಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಪರಿಶೀಲಿಸಲಾಗಿದೆ ಮತ್ತು ನೆಲದ-ಆಧಾರಿತ ಸಂವೇದನಾ ವೇದಿಕೆಗಳಿಗೆ ಹೋಲಿಸಿದರೆ, ಸಾಕಷ್ಟು ಸಂವೇದಕಗಳನ್ನು ಹೊಂದಿರುವ ಸಣ್ಣ UAV ಗಳು ಹಲವಾರು ಪ್ರಯೋಜನಗಳನ್ನು ನೀಡುತ್ತವೆ ಎಂದು ಅವರು ವಾದಿಸುತ್ತಾರೆ. , ಕ್ಷೇತ್ರಕ್ಕೆ ಸುಲಭ ಪ್ರವೇಶ, ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಡೇಟಾ, ಸಮರ್ಥ ಡೇಟಾ ಸಂಗ್ರಹಣೆ,
ಕ್ಷೇತ್ರದ ಬೆಳವಣಿಗೆಯ ಪರಿಸ್ಥಿತಿಗಳ ತ್ವರಿತ ಮೌಲ್ಯಮಾಪನ ಮತ್ತು ಕಡಿಮೆ ಕಾರ್ಯಾಚರಣೆಯ ವೆಚ್ಚಗಳು. ಆದಾಗ್ಯೂ, ಕ್ಷೇತ್ರ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ UAV ಯ ಪರಿಣಾಮಕಾರಿ ಅನ್ವಯವು ಎರಡು ಮೂಲಭೂತ ಅಂಶಗಳ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿದೆ, ಅವುಗಳೆಂದರೆ, UAV ವೈಶಿಷ್ಟ್ಯಗಳು (ಉದಾ, ಸುರಕ್ಷತೆ, ಸ್ಥಿರತೆ, ಸ್ಥಾನೀಕರಣ, ಸ್ವಾಯತ್ತತೆ) ಮತ್ತು ಸಂವೇದಕ ಗುಣಲಕ್ಷಣಗಳು (ಉದಾ, ರೆಸಲ್ಯೂಶನ್, ತೂಕ, ರೋಹಿತದ ತರಂಗಾಂತರಗಳು, ಕ್ಷೇತ್ರ ದೃಷ್ಟಿಕೋನದಿಂದ). ಹಘಿಘಟ್ಟಲಾಬ್ ಮತ್ತು ಇತರರು. (2016) UAV ಚಿತ್ರಣದಿಂದ ಪ್ಲಾಟ್-ಮಟ್ಟದ ಡೇಟಾವನ್ನು ಹಿಂಪಡೆಯಲು ಮತ್ತು ಸಂತಾನೋತ್ಪತ್ತಿ ಪ್ರಕ್ರಿಯೆಯನ್ನು ವೇಗಗೊಳಿಸಲು ಅರೆ-ಸ್ವಯಂಚಾಲಿತ ಇಮೇಜ್ ಪ್ರೊಸೆಸಿಂಗ್ ಪೈಪ್ಲೈನ್ ಅನ್ನು ಪ್ರಸ್ತಾಪಿಸಿದೆ. ಹಾಲ್ಮನ್ ಮತ್ತು ಇತರರು. (2016) ಹೆಚ್ಚಿನದನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದೆ
ಥ್ರೋಪುಟ್ ಕ್ಷೇತ್ರ ಫಿನೋಟೈಪಿಂಗ್ ಸಿಸ್ಟಮ್ ಮತ್ತು UAV ಗುಣಮಟ್ಟದ, ಬೃಹತ್, ಕ್ಷೇತ್ರ-ಆಧಾರಿತ ಫಿನೋಟೈಪಿಕ್ ಡೇಟಾವನ್ನು ಸಂಗ್ರಹಿಸಲು ಸಮರ್ಥವಾಗಿದೆ ಮತ್ತು ಸಾಧನವು ದೊಡ್ಡ ಪ್ರದೇಶಗಳಿಗೆ ಮತ್ತು ವಿವಿಧ ಕ್ಷೇತ್ರಗಳಾದ್ಯಂತ ಪರಿಣಾಮಕಾರಿಯಾಗಿದೆ ಎಂದು ಹೈಲೈಟ್ ಮಾಡಿದೆ.
ಇಳುವರಿ ಅಂದಾಜು ನಂಬಲಾಗದಷ್ಟು ಪ್ರಮುಖವಾದ ಮಾಹಿತಿಯಾಗಿದೆ, ನಿರ್ದಿಷ್ಟವಾಗಿ ಸಮಯಕ್ಕೆ ಲಭ್ಯವಿದ್ದಾಗ, UAV ಗಳಿಗೆ ಎಲ್ಲಾ ಕ್ಷೇತ್ರ ಮಾಪನಗಳನ್ನು ಒದಗಿಸಲು ಮತ್ತು ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಡೇಟಾವನ್ನು ಸಮರ್ಥವಾಗಿ ಪಡೆದುಕೊಳ್ಳುವ ಸಾಮರ್ಥ್ಯವಿದೆ (ಡಾಕಿರ್ ಮತ್ತು ಇತರರು, 2017; ಡೆಮಿರ್ ಮತ್ತು ಇತರರು., 2018 ; ಎನ್ಸಿಸೊ ಮತ್ತು ಇತರರು, 2019; ಕುಲ್ಬಕಿ ಮತ್ತು ಇತರರು, 2018; ಪುಡೆಲ್ಕೊ ಮತ್ತು ಇತರರು., 2012). ಈ ನಿಟ್ಟಿನಲ್ಲಿ, ಜಿನ್ ಮತ್ತು ಇತರರು. (2017) ಹೊರಹೊಮ್ಮುವ ಹಂತದಲ್ಲಿ ಗೋಧಿ ಸಸ್ಯದ ಸಾಂದ್ರತೆಯನ್ನು ಅಂದಾಜು ಮಾಡುವ ವಿಧಾನವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲು ಮತ್ತು ನಿರ್ಣಯಿಸಲು UAV ಗಳು ಅತ್ಯಂತ ಕಡಿಮೆ ಎತ್ತರದಲ್ಲಿ ಪಡೆದ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಣದ ಪ್ರಯೋಜನವನ್ನು ಪಡೆದುಕೊಂಡವು. ಲೇಖಕರ ಪ್ರಕಾರ, UAV ಗಳು ಕ್ಯಾಮೆರಾಗಳೊಂದಿಗೆ ಸಜ್ಜುಗೊಂಡ ರೋವರ್ ಸಿಸ್ಟಮ್ಗಳ ಮಿತಿಗಳನ್ನು ಮೀರಿಸುತ್ತದೆ ಮತ್ತು ಬೆಳೆಗಳಲ್ಲಿನ ಸಸ್ಯ ಸಾಂದ್ರತೆಯನ್ನು ಅಂದಾಜು ಮಾಡಲು ಆಕ್ರಮಣಶೀಲವಲ್ಲದ ವಿಧಾನವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ, ಇದು ಮಣ್ಣಿನ ಸಂಚಾರಕ್ಕೆ ಸ್ವತಂತ್ರವಾಗಿ ಕ್ಷೇತ್ರ ಫಿನೋಟೈಪಿಂಗ್ಗೆ ಅಗತ್ಯವಾದ ಹೆಚ್ಚಿನ ಥ್ರೋಪುಟ್ ಅನ್ನು ಸಾಧಿಸಲು ರೈತರಿಗೆ ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಲಿ ಮತ್ತು ಇತರರು. (2016) ಮೇಲಾವರಣದ ಎತ್ತರ ಮತ್ತು ನೆಲದ ಮೇಲಿನ ಜೀವರಾಶಿ ಸೇರಿದಂತೆ ಮೆಕ್ಕೆಜೋಳದ ನಿಯತಾಂಕಗಳನ್ನು ಅಂದಾಜು ಮಾಡಲು UAV-ಆಧಾರಿತ ವ್ಯವಸ್ಥೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಅತ್ಯಂತ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಹೊಂದಿರುವ ನೂರಾರು ಸ್ಟಿರಿಯೊ ಚಿತ್ರಗಳನ್ನು ಸಂಗ್ರಹಿಸಲಾಗಿದೆ. ಅಂತಿಮವಾಗಿ, ಯು ಮತ್ತು ಇತರರು. (2017) UAV ಗಳಿಂದ ನಿರ್ಧರಿಸಲಾದ ಬೆಳೆ ಎತ್ತರವು ಭೂಮಿಯ ಮೇಲಿನ ಜೀವರಾಶಿ (AGB) ಅಂದಾಜನ್ನು ಹೆಚ್ಚಿಸಬಹುದು ಎಂದು ಕಂಡುಹಿಡಿದಿದೆ.
ಬೆಳೆ ಬೆಳವಣಿಗೆಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವ ವಿಧಾನವೆಂದರೆ ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಕಲ್ಪನೆ (ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು, 2014, 2015; ಹಾಲ್ಮನ್ ಮತ್ತು ಇತರರು, 2016; ಪಾಂಡೆ, ಶ್ರೇಷ್ಠಾ, ಮತ್ತು ಇತರರು, 2020; ಸುಮೇಶ್ ಮತ್ತು ಇತರರು., 2021). ಸಸ್ಯಗಳ ಎತ್ತರವನ್ನು ಸೆರೆಹಿಡಿಯಲು ಮತ್ತು ಅವುಗಳ ಬೆಳವಣಿಗೆಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು UAV ಯಿಂದ ತೆಗೆದ ಚಿತ್ರಗಳ ಕಾರ್ಯಸಾಧ್ಯತೆಯನ್ನು ಹಲವಾರು ಅಧ್ಯಯನಗಳು ಎತ್ತಿ ತೋರಿಸಿವೆ. ಉದಾಹರಣೆಗೆ, ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು. (2013) UAV ಬಳಸಿಕೊಂಡು 0.05 m ಗಿಂತ ಕಡಿಮೆ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಹೊಂದಿರುವ ಬಹು-ತಾತ್ಕಾಲಿಕ ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿಗಳ ಅಭಿವೃದ್ಧಿಯನ್ನು ವಿವರಿಸಲಾಗಿದೆ. ಅವರು ಬೆಳೆ ಪತ್ತೆ ಮಾಡುವ ಗುರಿಯನ್ನು ಹೊಂದಿದ್ದರು
ಬೆಳವಣಿಗೆಯ ವ್ಯತ್ಯಾಸ ಮತ್ತು ಬೆಳೆ ಚಿಕಿತ್ಸೆ, ತಳಿ ಮತ್ತು ಒತ್ತಡದ ಮೇಲೆ ಅದರ ಅವಲಂಬನೆ. ಬೆಂಡಿಗ್ ಮತ್ತು ಇತರರು. (2014) UAV ಗಳನ್ನು ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿಗಳಿಂದ ಹೊರತೆಗೆಯಲಾದ ಸಸ್ಯದ ಎತ್ತರವನ್ನು ಆಧರಿಸಿ ತಾಜಾ ಮತ್ತು ಒಣ ಜೀವರಾಶಿಗಳನ್ನು ಅಂದಾಜು ಮಾಡಲು ಬಳಸಲಾಗಿದೆ ಮತ್ತು ವಾಯುಗಾಮಿ ವೇದಿಕೆಗಳು ಮತ್ತು ಭೂಮಿಯ ಲೇಸರ್ ಸ್ಕ್ಯಾನಿಂಗ್ಗಿಂತ ಭಿನ್ನವಾಗಿ, UAV ಗಳಿಂದ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಗಳು ವಿಭಿನ್ನ ಬೆಳವಣಿಗೆಗೆ ಸಸ್ಯ ಎತ್ತರದ ಮಾದರಿಯ ನಿಖರತೆಯನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಹೆಚ್ಚಿಸಬಹುದು. ಹಂತಗಳು. ಅದೇ ಧಾಟಿಯಲ್ಲಿ, ಗೈಪೆಲ್ ಮತ್ತು ಇತರರು. (2014) ಚಿತ್ರಣವನ್ನು ಪಡೆಯಲು ತಮ್ಮ ಸಂಶೋಧನೆಯಲ್ಲಿ UAV ಗಳನ್ನು ಬಳಸಿದ್ದಾರೆ
ಮೆಕ್ಕೆಜೋಳದ ಧಾನ್ಯದ ಇಳುವರಿ ಮುನ್ಸೂಚನೆಗಾಗಿ ಮೂರು ವಿಭಿನ್ನ ಬೆಳವಣಿಗೆಯ ಹಂತಗಳಲ್ಲಿ ಆರಂಭಿಕ ಮತ್ತು ಮಧ್ಯ-ಋತುವಿನ ದತ್ತಾಂಶಗಳು ಮತ್ತು ವೈಮಾನಿಕ ಚಿತ್ರಗಳು ಮತ್ತು ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿಗಳ ಆಧಾರದ ಮೇಲೆ ರೋಹಿತ ಮತ್ತು ಪ್ರಾದೇಶಿಕ ಮಾದರಿಗಳ ಸಂಯೋಜನೆಯು ಮಧ್ಯ-ಋತುವಿನ ಮೆಕ್ಕೆಜೋಳದ ಇಳುವರಿಯನ್ನು ಊಹಿಸಲು ಸೂಕ್ತವಾದ ವಿಧಾನವಾಗಿದೆ ಎಂದು ತೀರ್ಮಾನಿಸಿದೆ. ಅಂತಿಮವಾಗಿ, Gnadinger ¨ ಮತ್ತು Schmidhalter (2017) ನಿಖರವಾದ ಫಿನೋಟೈಪಿಂಗ್ನಲ್ಲಿ UAV ಯ ಉಪಯುಕ್ತತೆಯನ್ನು ಪರಿಶೀಲಿಸಿದರು ಮತ್ತು ಈ ತಂತ್ರಜ್ಞಾನದ ಬಳಕೆಯು ಕೃಷಿ ನಿರ್ವಹಣೆಯನ್ನು ವರ್ಧಿಸುತ್ತದೆ ಮತ್ತು ತಳಿ ಮತ್ತು ಕೃಷಿ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಕ್ಷೇತ್ರ ಪ್ರಯೋಗವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುತ್ತದೆ ಎಂದು ಹೈಲೈಟ್ ಮಾಡಿದರು. ಒಟ್ಟಾರೆಯಾಗಿ, ಕ್ಲಸ್ಟರ್ 2 ರಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ರಿಮೋಟ್ನಲ್ಲಿರುವ UAV ಗಳ ಮುಖ್ಯ ಅನುಕೂಲಗಳ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸುತ್ತವೆ ಎಂದು ನಾವು ಗಮನಿಸುತ್ತೇವೆ
ಫಿನೋಟೈಪಿಂಗ್, ಇಳುವರಿ ಅಂದಾಜು, ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾಡೆಲಿಂಗ್ ಮತ್ತು ಸಸ್ಯ ಎಣಿಕೆ. ಭವಿಷ್ಯದ ಅಧ್ಯಯನಗಳು ರಿಮೋಟ್ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ ಹೊಸ ವಿಧಾನಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಮೂಲಕ ಆಳವಾಗಿ ಅಗೆಯಬಹುದು ಅದು ರಿಮೋಟ್ ಇಂದ್ರಿಯ ಡೇಟಾದ ಸಂಸ್ಕರಣೆಯನ್ನು ಸ್ವಯಂಚಾಲಿತ ಮತ್ತು ಆಪ್ಟಿಮೈಜ್ ಮಾಡಬಹುದು (ಬರಾಬಾಸ್ಚಿ ಮತ್ತು ಇತರರು, 2016; ಲೈಬಿಸ್ಚ್ ಮತ್ತು ಇತರರು, 2015; ಮೊಚಿಡಾ ಮತ್ತು ಇತರರು., 2015; ಎಸ್. ಝೌ et ., 2021). ಹೆಚ್ಚುವರಿಯಾಗಿ, UAV ಗಳಲ್ಲಿ ಅಳವಡಿಸಲಾದ IoT ಸಂವೇದಕಗಳ ಕಾರ್ಯಕ್ಷಮತೆ ಮತ್ತು ಅವುಗಳ ವೆಚ್ಚಗಳು, ಕಾರ್ಮಿಕರು ಮತ್ತು ಇಳುವರಿ ಅಂದಾಜಿನ ನಿಖರತೆಯ ನಡುವಿನ ವ್ಯಾಪಾರವನ್ನು ಸಂಶೋಧಿಸಬೇಕು
ಭವಿಷ್ಯ (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). ಅಂತಿಮವಾಗಿ, ವಿಶ್ವಾಸಾರ್ಹ ಮಾಹಿತಿಯನ್ನು ಉತ್ಪಾದಿಸುವ, ಕೃಷಿ ಉತ್ಪಾದನೆಯಲ್ಲಿ ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚಿಸುವ ಮತ್ತು ರೈತರ ಕೈಯಾರೆ ಎಣಿಸುವ ಕೆಲಸವನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಸಮರ್ಥ ಇಮೇಜ್ ಪ್ರೊಸೆಸಿಂಗ್ ವಿಧಾನಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಅವಶ್ಯಕತೆಯಿದೆ (RU ಖಾನ್ ಮತ್ತು ಇತರರು, 2021; ಕೊಹ್ ಮತ್ತು ಇತರರು, 2021; ಲಿನ್ & ಗುವೋ, 2020; ಸಿ. ಜಾಂಗ್ ಮತ್ತು ಇತರರು, 2020).
ಕ್ಲಸ್ಟರ್ 3. ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು UAV ಪ್ಲಾಟ್ಫಾರ್ಮ್ಗಳಲ್ಲಿ ಬಳಸಿದ ಕೃಷಿ ಸಂಪನ್ಮೂಲಗಳ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ಗಾಗಿ ವಿವಿಧ ರೀತಿಯ ಇಮೇಜಿಂಗ್ ಸಿಸ್ಟಮ್ಗಳನ್ನು ಚರ್ಚಿಸುತ್ತವೆ. ಈ ನಿಟ್ಟಿನಲ್ಲಿ, ಥರ್ಮಲ್ ಇಮೇಜಿಂಗ್ ಬೆಳೆ ಹಾನಿಯನ್ನು ತಡೆಗಟ್ಟಲು ಮತ್ತು ಬರಗಾಲದ ಒತ್ತಡವನ್ನು ಮೊದಲೇ ಪತ್ತೆಹಚ್ಚಲು ಮೇಲ್ಮೈ ತಾಪಮಾನದ ಮೇಲ್ವಿಚಾರಣೆಯನ್ನು ಅನುಮತಿಸುತ್ತದೆ (ಅವೈಸ್ ಮತ್ತು ಇತರರು, 2022; ಗಾರ್ಸಿಯಾ-ಟೆಜೆರೊ ಮತ್ತು ಇತರರು, 2018; ಸಂಕರನ್ ಮತ್ತು ಇತರರು., 2015; ಸ್ಯಾಂಟೆಸ್ಟೆಬಾನ್ ಮತ್ತು ಇತರರು., 2017; ಯೆಯೋಮ್, 2021). ಬಲುಜಾ ಮತ್ತು ಇತರರು. (2012) ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮತ್ತು ಥರ್ಮಲ್ ಕ್ಯಾಮೆರಾಗಳ ಬಳಕೆಯನ್ನು ಆನ್ಬೋರ್ಡ್ನಲ್ಲಿ ಪ್ರತಿಪಾದಿಸಿದೆ
UAV ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಗಳನ್ನು ಪಡೆಯಲು ಮತ್ತು ಬಳ್ಳಿ ನೀರಿನ ಸ್ಥಿತಿಯನ್ನು ನಿರ್ಣಯಿಸಲು ಸಂಶೋಧಕರನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಿತು. ರಿಮೋಟ್-ಸೆನ್ಸಿಂಗ್ ಡೇಟಾವನ್ನು ಬಳಸಿಕೊಂಡು ಹೊಸ ನೀರಿನ ವೇಳಾಪಟ್ಟಿ ಮಾದರಿಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲು ಇದು ಉಪಯುಕ್ತವಾಗಿದೆ (ಬಲುಜಾ ಮತ್ತು ಇತರರು, 2012). ಏಕೆಂದರೆ
UAVಗಳ ಸೀಮಿತ ಲೋಡ್ ಸಾಮರ್ಥ್ಯ, ರಿಬೈರೊ-ಗೋಮ್ಸ್ ಮತ್ತು ಇತರರು. (2017) ಸ್ಥಾವರಗಳಲ್ಲಿನ ನೀರಿನ ಒತ್ತಡವನ್ನು ನಿರ್ಧರಿಸಲು UAVS ಗೆ ತಂಪಾಗಿಸದ ಥರ್ಮಲ್ ಕ್ಯಾಮೆರಾಗಳ ಏಕೀಕರಣವನ್ನು ಪರಿಗಣಿಸಲಾಗಿದೆ, ಇದು ಈ ರೀತಿಯ UAV ಗಳನ್ನು ಸಾಂಪ್ರದಾಯಿಕ ಉಪಗ್ರಹ-ಆಧಾರಿತ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು UAV ಗಳಿಗಿಂತ ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ಮತ್ತು ಕಾರ್ಯಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಲೇಖಕರ ಪ್ರಕಾರ, ತಂಪಾಗಿಸದ ಥರ್ಮಲ್ ಕ್ಯಾಮೆರಾಗಳು ತಂಪಾಗುವ ಕ್ಯಾಮೆರಾಗಳಿಗಿಂತ ಹಗುರವಾಗಿರುತ್ತವೆ, ಸೂಕ್ತವಾದ ಮಾಪನಾಂಕ ನಿರ್ಣಯದ ಅಗತ್ಯವಿರುತ್ತದೆ. ಗೊನ್ಜಾಲೆಜ್-ಡುಗೊ ಮತ್ತು ಇತರರು. (2014) ಉಷ್ಣ ಚಿತ್ರಣವು ನೀರಿನ ಸ್ಥಿತಿಯನ್ನು ನಿರ್ಣಯಿಸಲು ಮತ್ತು ಸಿಟ್ರಸ್ ತೋಟಗಳ ನಡುವೆ ಮತ್ತು ಒಳಗೆ ನೀರಿನ ಒತ್ತಡವನ್ನು ಪ್ರಮಾಣೀಕರಿಸಲು ಬೆಳೆ ನೀರಿನ ಒತ್ತಡ ಸೂಚ್ಯಂಕಗಳ ಪ್ರಾದೇಶಿಕ ನಕ್ಷೆಗಳನ್ನು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ಉತ್ಪಾದಿಸುತ್ತದೆ ಎಂದು ತೋರಿಸಿದೆ. ಗೊನ್ಜಾಲೆಜ್-ಡುಗೊ ಮತ್ತು ಇತರರು. (2013) ಮತ್ತು Santesteban et al. (2017) ವಾಣಿಜ್ಯ ಹಣ್ಣಿನ ತೋಟ ಮತ್ತು ದ್ರಾಕ್ಷಿತೋಟದ ನೀರಿನ ಸ್ಥಿತಿಯ ವ್ಯತ್ಯಾಸವನ್ನು ಅಂದಾಜು ಮಾಡಲು ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ UAV ಥರ್ಮಲ್ ಚಿತ್ರಣದ ಬಳಕೆಯನ್ನು ತನಿಖೆ ಮಾಡಿದೆ.
ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಸಾಂಪ್ರದಾಯಿಕ RGB (ಕೆಂಪು, ಹಸಿರು ಮತ್ತು ನೀಲಿ) ಚಿತ್ರಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಬೃಹತ್ ಡೇಟಾವನ್ನು ಒದಗಿಸಬಹುದು (Ad˜ ao et al., 2017; Navia et al., 2016). ಈ ಸ್ಪೆಕ್ಟ್ರಲ್ ಡೇಟಾ, ಪ್ರಾದೇಶಿಕ ದತ್ತಾಂಶದೊಂದಿಗೆ, ವರ್ಗೀಕರಣ, ಮ್ಯಾಪಿಂಗ್, ಮುನ್ಸೂಚನೆ, ಭವಿಷ್ಯ ಮತ್ತು ಪತ್ತೆ ಉದ್ದೇಶಗಳಲ್ಲಿ ಸಹಾಯ ಮಾಡಬಹುದು (ಬರ್ನಿ ಮತ್ತು ಇತರರು, 2009b). ಕ್ಯಾಂಡಿಯಾಗೊ ಮತ್ತು ಇತರರ ಪ್ರಕಾರ. (2015), UAV ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಒಂದು ವಿಶ್ವಾಸಾರ್ಹ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ಸಂಪನ್ಮೂಲವಾಗಿ ಬೆಳೆ ಮೌಲ್ಯಮಾಪನ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಗೆ ಬೃಹತ್ ಪ್ರಮಾಣದಲ್ಲಿ ಕೊಡುಗೆ ನೀಡಬಹುದು. ಅಲ್ಲದೆ,
ಖಾಲಿಕ್ ಮತ್ತು ಇತರರು. (2019) ಉಪಗ್ರಹ ಮತ್ತು UAV ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ನಡುವೆ ಹೋಲಿಕೆ ಮಾಡಿದೆ. UAV-ಆಧಾರಿತ ಚಿತ್ರಗಳು ದ್ರಾಕ್ಷಿತೋಟದ ವ್ಯತ್ಯಾಸವನ್ನು ವಿವರಿಸುವಲ್ಲಿ ಹೆಚ್ಚು ನಿಖರವಾದವು ಮತ್ತು ಬೆಳೆ ಮೇಲಾವರಣಗಳನ್ನು ಪ್ರತಿನಿಧಿಸಲು ಹುರುಪು ನಕ್ಷೆಗಳು. ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಹೇಳುವುದಾದರೆ, ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಲೇಖನಗಳು ಕೃಷಿ UAV ಗಳಲ್ಲಿ ಉಷ್ಣ ಮತ್ತು ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಸಂವೇದಕಗಳ ಸಂಯೋಜನೆಯನ್ನು ಚರ್ಚಿಸುತ್ತವೆ. ಅಂತೆಯೇ, ಥರ್ಮಲ್ ಮತ್ತು ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಅನ್ನು AI ಯೊಂದಿಗೆ ಹೇಗೆ ಸಂಯೋಜಿಸಬಹುದು ಎಂಬುದನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಹೆಚ್ಚಿನ ಸಂಶೋಧನೆ ಅಗತ್ಯವಿದೆ.
ಸಸ್ಯಗಳ ಒತ್ತಡವನ್ನು ಪತ್ತೆಹಚ್ಚಲು ತಂತ್ರಗಳು (ಉದಾ, ಆಳವಾದ ಕಲಿಕೆ) (ಅಂಪಟ್ಜಿಡಿಸ್ ಮತ್ತು ಇತರರು, 2020; ಅಂಪಾಟ್ಜಿಡಿಸ್ ಮತ್ತು ಪಾರ್ಟೆಲ್, 2019; ಜಂಗ್ ಮತ್ತು ಇತರರು, 2021; ಸ್ಯಾಂಟೆಸ್ಟೆಬಾನ್ ಮತ್ತು ಇತರರು, 2017; ಸೈಡಾ ಮತ್ತು ಇತರರು., 2021). ಅಂತಹ ಒಳನೋಟಗಳು ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ಮತ್ತು ನಿಖರವಾದ ಪತ್ತೆಹಚ್ಚುವಿಕೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸಸ್ಯಗಳ ಬೆಳವಣಿಗೆ, ಒತ್ತಡ ಮತ್ತು ಫಿನಾಲಾಜಿಯ ಮೇಲ್ವಿಚಾರಣೆಗೆ ಸಹಾಯ ಮಾಡುತ್ತದೆ (ಬಟರ್ಸ್ ಮತ್ತು ಇತರರು, 2019; ಕಾವೊ ಮತ್ತು ಇತರರು, 2020; ನ್ಯೂಪಾನ್ ಮತ್ತು ಬೈಸಲ್ಗುರೆಲ್, 2021; ಎಲ್. ಝೌ ಮತ್ತು ಇತರರು., 2020).
ಕ್ಲಸ್ಟರ್ 4. ಈ ಕ್ಲಸ್ಟರ್ ಏಳು ಪೇಪರ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ, ಅದು ಕೃಷಿ ಪದ್ಧತಿಗಳನ್ನು ಬೆಂಬಲಿಸುವಲ್ಲಿ ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಮತ್ತು ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ನ ನಿರ್ಣಾಯಕ ಪಾತ್ರದ ಸುತ್ತ ಸುತ್ತುತ್ತದೆ. ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ವಿಧಾನವಾಗಿ ತನ್ನನ್ನು ತಾನು ಸ್ಥಾಪಿಸಿಕೊಂಡಿದೆ ಅದು ಭೂಮಿಯ ವ್ಯವಸ್ಥೆಯ ಪರಿಮಾಣಾತ್ಮಕ ಮೌಲ್ಯಮಾಪನವನ್ನು ಶಕ್ತಗೊಳಿಸುತ್ತದೆ (ಸ್ಕೇಪ್ಮನ್ ಮತ್ತು ಇತರರು, 2009).ಹೆಚ್ಚು ನಿಖರವಾಗಿ ಹೇಳಬೇಕೆಂದರೆ, ಇದು ಮೇಲ್ಮೈ ವಸ್ತುಗಳ ಗುರುತಿಸುವಿಕೆ, (ಸಾಪೇಕ್ಷ) ಸಾಂದ್ರತೆಗಳ ಪ್ರಮಾಣ ಮತ್ತು ಮೇಲ್ಮೈ ಘಟಕದ ಅನುಪಾತಗಳ ನಿಯೋಜನೆ
ಮಿಶ್ರ ಪಿಕ್ಸೆಲ್ಗಳ ಒಳಗೆ (ಕಿರ್ಷ್ ಮತ್ತು ಇತರರು, 2018; ಝಾವೋ ಮತ್ತು ಇತರರು, 2022). ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಹೇಳುವುದಾದರೆ, ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸಿಸ್ಟಮ್ಗಳು ಒದಗಿಸಿದ ಹೆಚ್ಚಿನ ಸ್ಪೆಕ್ಟ್ರಲ್ ರೆಸಲ್ಯೂಶನ್ ಸಸ್ಯಾಹಾರಿ ಗುಣಲಕ್ಷಣಗಳು ಅಥವಾ ಎಲೆಗಳ ನೀರಿನ ಅಂಶದಂತಹ ವಿವಿಧ ನಿಯತಾಂಕಗಳ ಹೆಚ್ಚು ನಿಖರವಾದ ಅಂದಾಜುಗಳನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುತ್ತದೆ (ಸುವೊಮಲೈನೆನ್ ಮತ್ತು ಇತರರು, 2014). ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿರುವ ಸಂಶೋಧಕರು ಅಂತಹ ವ್ಯವಸ್ಥೆಗಳ ವಿವಿಧ ಅಂಶಗಳನ್ನು ತನಿಖೆ ಮಾಡಿದರು. ಇತರರಲ್ಲಿ, ಆಸೆನ್ ಮತ್ತು ಇತರರು. (2015b) ಹಗುರವಾದ ಮೂರು ಆಯಾಮದ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಮಾಹಿತಿಯನ್ನು ಪಡೆಯಲು ಒಂದು ಅನನ್ಯ ವಿಧಾನವನ್ನು ನೀಡಿತು
ಸಸ್ಯವರ್ಗದ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ UAV ಗಳಲ್ಲಿ ಬಳಸಲಾಗುವ ಸ್ನ್ಯಾಪ್ಶಾಟ್ ಕ್ಯಾಮೆರಾಗಳು. ಲೂಸಿಯರ್ ಮತ್ತು ಇತರರು. (2014) ಒಂದು ಕಾದಂಬರಿ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ UAS ನ ವಿನ್ಯಾಸ, ಅಭಿವೃದ್ಧಿ ಮತ್ತು ವೈಮಾನಿಕ ಕಾರ್ಯಾಚರಣೆಗಳ ಜೊತೆಗೆ ಅದರೊಂದಿಗೆ ಸಂಗ್ರಹಿಸಲಾದ ಚಿತ್ರದ ಡೇಟಾದ ಮಾಪನಾಂಕ ನಿರ್ಣಯ, ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ವ್ಯಾಖ್ಯಾನವನ್ನು ಚರ್ಚಿಸಲಾಗಿದೆ. ಅಂತಿಮವಾಗಿ, Honkavaara et al. (2013b) FabryPerot ಇಂಟರ್ಫೆರೋಮೀಟರ್-ಆಧಾರಿತ ಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಗಳಿಗಾಗಿ ಸಮಗ್ರ ಸಂಸ್ಕರಣಾ ವಿಧಾನವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿತು ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಜೈವಿಕ ಅಂದಾಜು ವಿಧಾನದಲ್ಲಿ ಅದರ ಬಳಕೆಯನ್ನು ತೋರಿಸಿದೆ. ಈ ಪ್ರಸ್ತುತ ಕ್ಲಸ್ಟರ್ಗೆ ಭವಿಷ್ಯದ ಸಂಭಾವ್ಯ ಮಾರ್ಗಗಳು ಸಂವೇದಕ ತಂತ್ರಜ್ಞಾನಗಳಲ್ಲಿನ ತಾಂತ್ರಿಕ ಸುಧಾರಣೆಗಳ ಅಗತ್ಯವನ್ನು ಒತ್ತಿಹೇಳುತ್ತವೆ (ಆಸೆನ್ ಮತ್ತು ಇತರರು, 2015b) ಜೊತೆಗೆ ಪೂರಕ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಸಂಯೋಜಿಸುವ ಮತ್ತು ಹೆಚ್ಚಿಸುವ ಅಗತ್ಯತೆ, ನಿರ್ದಿಷ್ಟವಾಗಿ ದೊಡ್ಡ ಡೇಟಾ ಮತ್ತು ವಿಶ್ಲೇಷಣೆಗಳು (ಆಂಗ್ & ಸೆಂಗ್, 2021; -ಗ್ರಾಮಟಿಕಿಸ್ ಮತ್ತು ಇತರರು, 2020; ಶಕೂರ್ ಮತ್ತು ಇತರರು, 2019). ಎರಡನೆಯದು ಮುಖ್ಯವಾಗಿ ಸ್ಮಾರ್ಟ್ ಕೃಷಿಯಲ್ಲಿ ಅಳವಡಿಸಲಾದ ವಿವಿಧ ಸಂವೇದಕಗಳಿಂದ ಉತ್ಪತ್ತಿಯಾಗುವ ನಿರಂತರವಾಗಿ ಬೆಳೆಯುತ್ತಿರುವ ಡೇಟಾದಿಂದ ಉಂಟಾಗುತ್ತದೆ (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021).
ಕ್ಲಸ್ಟರ್ 5. ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಪ್ರಕಟಣೆಗಳು ಡ್ರೋನ್-ಆಧಾರಿತ 3Dಮ್ಯಾಪಿಂಗ್ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಪರೀಕ್ಷಿಸಿವೆ. 3D ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ಡ್ರೋನ್ಗಳನ್ನು ಬಳಸುವುದರಿಂದ ಸಂಕೀರ್ಣ ಕ್ಷೇತ್ರಕಾರ್ಯವನ್ನು ನಿವಾರಿಸಬಹುದು ಮತ್ತು ದಕ್ಷತೆಯನ್ನು ಗಣನೀಯವಾಗಿ ಹೆಚ್ಚಿಸಬಹುದು (Torres-Sanchez ô et al., 2015). ಕ್ಲಸ್ಟರ್ನಲ್ಲಿನ ಐದು ಲೇಖನಗಳು ಮುಖ್ಯವಾಗಿ ಸಸ್ಯ ಮಾನಿಟರಿಂಗ್ ಅಪ್ಲಿಕೇಶನ್ಗಳ ಮೇಲೆ ಕೇಂದ್ರೀಕೃತವಾಗಿವೆ. ಉದಾಹರಣೆಗೆ, ಮೇಲಾವರಣ ಪ್ರದೇಶ, ಮರದ ಎತ್ತರ ಮತ್ತು ಕಿರೀಟದ ಪರಿಮಾಣದ ಬಗ್ಗೆ ಮೂರು ಆಯಾಮದ ಡೇಟಾವನ್ನು ಪಡೆಯಲು, ಟೊರೆಸ್-ಸ್ಯಾಂಚೆಜ್ ´ et al. (2015) UAV ತಂತ್ರಜ್ಞಾನವನ್ನು ಡಿಜಿಟಲ್ ಮೇಲ್ಮೈ ಮಾದರಿಗಳನ್ನು ಉತ್ಪಾದಿಸಲು ಮತ್ತು ನಂತರ ವಸ್ತು ಆಧಾರಿತ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ (OBIA) ವಿಧಾನಗಳನ್ನು ಬಳಸಲಾಗಿದೆ. ಮುಂದೆ, ಝಾರ್ಕೊ-ತೇಜಡಾ ಮತ್ತು ಇತರರು. (2014) UAV ತಂತ್ರಜ್ಞಾನ ಮತ್ತು ಮೂರು ಆಯಾಮದ ಫೋಟೋ-ಪುನರ್ನಿರ್ಮಾಣ ವಿಧಾನಗಳನ್ನು ಸಂಯೋಜಿಸುವ ಮೂಲಕ ಮರದ ಎತ್ತರವನ್ನು ಪ್ರಮಾಣೀಕರಿಸಲಾಗಿದೆ. ಜಿಮೆನೆಜ್-ಬ್ರೆನೆಸ್ ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್, ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ, ಮತ್ತು ಇತರರು. (2017) UAV ತಂತ್ರಜ್ಞಾನವನ್ನು ಸುಧಾರಿತ OBIA ವಿಧಾನದೊಂದಿಗೆ ಸಂಯೋಜಿಸುವ ಮೂಲಕ ಹಲವಾರು ಆಲಿವ್ ಮರಗಳ ಬಹು-ತಾತ್ಕಾಲಿಕ, 3D ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಹೊಸ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪ್ರದರ್ಶಿಸಿದರು. ಈ ಕ್ಲಸ್ಟರ್ನಲ್ಲಿ ಭವಿಷ್ಯದ ಕೆಲಸಗಳಿಗೆ ಆಸಕ್ತಿದಾಯಕ ಮಾರ್ಗಗಳು ಪ್ರಸ್ತುತ ಸುಧಾರಿಸುವುದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ
ವಿಧಾನಗಳು (ಝಾರ್ಕೊ-ತೇಜಾಡಾ ಮತ್ತು ಇತರರು, 2014) ಡಿಜಿಟಲ್ ಮೇಲ್ಮೈ ಮಾಡೆಲಿಂಗ್ ಉದ್ದೇಶಗಳಿಗಾಗಿ (ಅಜಯ್ ಮತ್ತು ಇತರರು, 2017; ಜೌಡ್ ಮತ್ತು ಇತರರು, 2016), ಉದಾಹರಣೆಗೆ ಒಬಿಐಎ (ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ ಮತ್ತು ಇತರರು, 2018, 2020; ವೆಂಚುರಾ ಮತ್ತು ಇತರರು. , 2018), ಮತ್ತು ಫೋಟೋ ಪುನರ್ನಿರ್ಮಾಣ ಅಥವಾ ಅಭಿವೃದ್ಧಿಶೀಲ ಕಾದಂಬರಿ ವಿಧಾನಗಳು (Díaz-Varela et al., 2015; Torres-S´ anchez et al., 2015).
ಕ್ಲಸ್ಟರ್ 6. ಈ ಕ್ಲಸ್ಟರ್ ಕೃಷಿ ಕಣ್ಗಾವಲಿನಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಪಾತ್ರವನ್ನು ಚರ್ಚಿಸುತ್ತದೆ. UAV ಗಳು ಉಪಗ್ರಹ ಮತ್ತು ವಿಮಾನ ಚಿತ್ರಣದ ನ್ಯೂನತೆಗಳನ್ನು ಪೂರಕವಾಗಿ ಮತ್ತು ನಿವಾರಿಸಬಲ್ಲವು. ಉದಾಹರಣೆಗೆ, ಅವರು ಕಡಿಮೆ ಇಂಧನ ಅಥವಾ ಪೈಲಟಿಂಗ್ ಸವಾಲುಗಳೊಂದಿಗೆ ನೈಜ-ಸಮಯದ ಇಮೇಜಿಂಗ್ ಬಳಿ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಅನ್ನು ಒದಗಿಸಬಹುದು, ಇದರ ಪರಿಣಾಮವಾಗಿ ಸ್ಥಿರ ಮತ್ತು ನೈಜ-ಸಮಯದ ಕಣ್ಗಾವಲು ಮತ್ತು ನಿರ್ಧಾರ-ಮಾಡುವಿಕೆಯಲ್ಲಿ ಸುಧಾರಣೆಗಳು (S. ಹರ್ವಿಟ್ಜ್ ಮತ್ತು ಇತರರು, 2004). UAV ಗಳ ಮತ್ತೊಂದು ಪ್ರಮುಖ ಕೊಡುಗೆ ಎಂದರೆ ನಿಖರವಾದ ಕೃಷಿ ಅಥವಾ ಸೈಟ್-ನಿರ್ದಿಷ್ಟ ಕೃಷಿಗಾಗಿ ಸೈಟ್-ನಿರ್ದಿಷ್ಟ ಡೇಟಾವನ್ನು ಒದಗಿಸುವ ಸಾಮರ್ಥ್ಯ, ಅವುಗಳ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್, ವಿವಿಧ ನಿಯತಾಂಕಗಳ ಬಗ್ಗೆ ವಿವರವಾದ ಮಾಹಿತಿಯು ರೈತರಿಗೆ ಭೂಮಿಯನ್ನು ಏಕರೂಪದ ಭಾಗಗಳಾಗಿ ವಿಂಗಡಿಸಲು ಮತ್ತು ಅದಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಚಿಕಿತ್ಸೆ ನೀಡಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ (ಹಂಟ್ ಮತ್ತು ಇತರರು. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012). ಇಂತಹ UAV-ಆಧಾರಿತ ಕೃಷಿ ಕಣ್ಗಾವಲು ಆಹಾರ ಭದ್ರತೆಯ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವಿಕೆಯನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ (SR Herwitz et al., 2004). ಕೃಷಿ ಕಣ್ಗಾವಲು ಸಂಶೋಧನೆಯನ್ನು ಮುಂದುವರಿಸಲು, ಸಂವೇದಕಗಳು, UAV ಗಳು ಮತ್ತು ಇತರ ಸಂಬಂಧಿತ ತಂತ್ರಜ್ಞಾನಗಳಲ್ಲಿನ ಸುಧಾರಣೆಗಳು ಮತ್ತು ಅವುಗಳ ಸಂವಹನ ಮತ್ತು ಡೇಟಾ ವರ್ಗಾವಣೆ ವಿಧಾನಗಳು ಮಾತ್ರ ಅಗತ್ಯವಿದೆ (Ewing et al., 2020; Shuai et al., 2019), ಆದರೆ ವಿವಿಧ ಡ್ರೋನ್ಗಳನ್ನು ಸಂಯೋಜಿಸುವುದು ಸ್ಮಾರ್ಟ್ ಕೃಷಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ವಿವಿಧ ಕಾರ್ಯಗಳನ್ನು ಉತ್ತಮಗೊಳಿಸುವ ತಂತ್ರಜ್ಞಾನಗಳು, ಮೇಲ್ವಿಚಾರಣೆ, ಕೃಷಿ ಕಣ್ಗಾವಲು ಮತ್ತು ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವಿಕೆ, ಹೆಚ್ಚಿನ ಸಂಭಾವ್ಯ ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರವಾಗಿದೆ (ಅಲ್ಸಾಮ್ಹಿ ಮತ್ತು ಇತರರು, 2021; ಪೋಪೆಸ್ಕು ಮತ್ತು ಇತರರು, 2020; ವುರಾನ್ ಮತ್ತು ಇತರರು., 2018). ಈ ನಿಟ್ಟಿನಲ್ಲಿ, IoT, WSN ಗಳು ಮತ್ತು ದೊಡ್ಡ ಡೇಟಾ ಆಸಕ್ತಿದಾಯಕ ಪೂರಕ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ನೀಡುತ್ತವೆ (ವಾನ್ ಡೆರ್ ಮೆರ್ವೆ ಮತ್ತು ಇತರರು, 2020). ಅನುಷ್ಠಾನದ ವೆಚ್ಚಗಳು, ವೆಚ್ಚ ಉಳಿತಾಯ, ಶಕ್ತಿಯ ದಕ್ಷತೆ ಮತ್ತು ಡೇಟಾ ಸುರಕ್ಷತೆಯು ಅಂತಹ ಏಕೀಕರಣಕ್ಕಾಗಿ ಕಡಿಮೆ-ಸಂಶೋಧನೆಯ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಸೇರಿವೆ (ಮಸ್ರೂರ್ ಮತ್ತು ಇತರರು, 2021).
ದೇಶಗಳು ಮತ್ತು ಶೈಕ್ಷಣಿಕ ಸಂಸ್ಥೆಗಳು
ಅಂತಿಮ ಹಂತವು ಮೂಲದ ದೇಶದ ತನಿಖೆ ಮತ್ತು ಲೇಖಕರ ಶೈಕ್ಷಣಿಕ ಸಂಬಂಧಗಳನ್ನು ಒಳಗೊಂಡಿತ್ತು. ಈ ವಿಶ್ಲೇಷಣೆಯ ಮೂಲಕ, ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗೆ ಕೊಡುಗೆ ನೀಡುವ ವಿದ್ವಾಂಸರ ಭೌಗೋಳಿಕ ವಿತರಣೆಯನ್ನು ಚೆನ್ನಾಗಿ ಅರ್ಥಮಾಡಿಕೊಳ್ಳುವ ಗುರಿಯನ್ನು ನಾವು ಹೊಂದಿದ್ದೇವೆ. ದೇಶಗಳು ಮತ್ತು ಶೈಕ್ಷಣಿಕ ಸಂಸ್ಥೆಗಳ ವೈವಿಧ್ಯತೆಯನ್ನು ಗಮನಿಸುವುದು ಗಮನಾರ್ಹವಾಗಿದೆ. ದೇಶದ ದೃಷ್ಟಿಕೋನದಿಂದ, USA, ಚೀನಾ, ಭಾರತ ಮತ್ತು ಇಟಲಿ ಪ್ರಕಟಣೆಗಳ ಸಂಖ್ಯೆಯ ವಿಷಯದಲ್ಲಿ ಪಟ್ಟಿಯ ಅಗ್ರಸ್ಥಾನದಲ್ಲಿದೆ (ಕೋಷ್ಟಕ 7). ಪ್ರಸ್ತುತ
ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮೇಲಿನ ಸಂಶೋಧನೆಯು ಹೆಚ್ಚಾಗಿ ಉತ್ತರ ಅಮೇರಿಕಾ ಮತ್ತು ಏಷ್ಯಾದ ದೇಶಗಳಲ್ಲಿ ಕೇಂದ್ರೀಕೃತವಾಗಿದೆ, ಮುಖ್ಯವಾಗಿ ಅವುಗಳ ನಿಖರವಾದ ಕೃಷಿ ಅನ್ವಯಿಕೆಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ತೊಡಗಿಸಿಕೊಳ್ಳುವಿಕೆಯಿಂದಾಗಿ. ಉದಾಹರಣೆಗೆ, USA ನಲ್ಲಿ, ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮಾರುಕಟ್ಟೆಯನ್ನು 841.9 ರಲ್ಲಿ 2020 ಮಿಲಿಯನ್ USD ಎಂದು ಅಂದಾಜಿಸಲಾಗಿದೆ, ಇದು ಜಾಗತಿಕ ಮಾರುಕಟ್ಟೆ ಪಾಲಿನ ಸರಿಸುಮಾರು 30% ರಷ್ಟಿದೆ (ರಿಪೋರ್ಟ್ಲಿಂಕರ್, 2021). ವಿಶ್ವದ ಅತಿದೊಡ್ಡ ಆರ್ಥಿಕತೆಯ ಶ್ರೇಯಾಂಕವನ್ನು ಹೊಂದಿರುವ ಚೀನಾವು 2.6 ರಲ್ಲಿ ಅಂದಾಜು ಮಾರುಕಟ್ಟೆ ಗಾತ್ರವನ್ನು 2027 ಶತಕೋಟಿ USD ತಲುಪುತ್ತದೆ ಎಂದು ಅಂದಾಜಿಸಲಾಗಿದೆ. ಈ ದೇಶವು ಉತ್ಪಾದಕತೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ನಿವಾರಿಸಲು ಮತ್ತು ಉತ್ತಮ ಇಳುವರಿ, ಕಾರ್ಮಿಕ ಪರಿಹಾರ ಮತ್ತು ಕಡಿಮೆ ಉತ್ಪಾದನಾ ಒಳಹರಿವುಗಳನ್ನು ಸಾಧಿಸಲು ಕೃಷಿ ಡ್ರೋನ್ಗಳಿಗೆ ಮನವಿ ಮಾಡುತ್ತಿದೆ. ಆದಾಗ್ಯೂ, ಚೀನಾದಲ್ಲಿ ತಂತ್ರಜ್ಞಾನದ ಅಳವಡಿಕೆಯು ಜನಸಂಖ್ಯೆಯ ಗಾತ್ರ ಮತ್ತು ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಬೆಳೆ ನಿರ್ವಹಣೆ ಅಭ್ಯಾಸಗಳನ್ನು ಆವಿಷ್ಕರಿಸುವ ಮತ್ತು ಸುಧಾರಿಸುವ ಅಗತ್ಯತೆಯಂತಹ ಅಂಶಗಳಿಂದ ಕೂಡ ನಡೆಸಲ್ಪಡುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಉತ್ಪಾದಕ ದೇಶಗಳು ಮತ್ತು ಕೊಡುಗೆ ನೀಡುವ ವಿಶ್ವವಿದ್ಯಾಲಯಗಳು/ಸಂಸ್ಥೆಗಳು
ಕೃಷಿ ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಂಶೋಧನೆ.
| ಶ್ರೇಣಿ | ದೇಶಗಳು |
| 1 | ಅಮೇರಿಕಾ |
| 2 | ಚೀನಾ |
| 3 | ಭಾರತದ ಸಂವಿಧಾನ |
| 4 | ಇಟಲಿ |
| 5 | ಸ್ಪೇನ್ |
| 6 | ಜರ್ಮನಿ |
| 7 | ಬ್ರೆಜಿಲ್ |
| 8 | ಆಸ್ಟ್ರೇಲಿಯಾ |
| 9 | ಜಪಾನ್ |
| 10 | ಯುನೈಟೆಡ್ ಕಿಂಗ್ಡಮ್ |
| ಶ್ರೇಣಿ | ವಿಶ್ವವಿದ್ಯಾಲಯಗಳು/ಸಂಸ್ಥೆಗಳು |
| 1 | ಚೈನೀಸ್ ಅಕಾಡೆಮಿ ಆಫ್ ಸೈನ್ಸಸ್ |
| 2 | ಪೀಪಲ್ಸ್ ರಿಪಬ್ಲಿಕ್ ಆಫ್ ಚೀನಾದ ಕೃಷಿ ಸಚಿವಾಲಯ |
| 3 | ಸುಪೀರಿಯರ್ ಕೌನ್ಸಿಲ್ ಆಫ್ ಸೈಂಟಿಫಿಕ್ ಇನ್ವೆಸ್ಟಿಗೇಷನ್ |
| 4 | ಟೆಕ್ಸಾಸ್ ಎ & ಎಂ ವಿಶ್ವವಿದ್ಯಾಲಯ |
| 5 | ಚೀನಾ ಕೃಷಿ ವಿಶ್ವವಿದ್ಯಾಲಯ |
| 6 | USDA ಕೃಷಿ ಸಂಶೋಧನಾ ಸೇವೆ |
| 7 | CSIC - ಇನ್ಸ್ಟಿಟ್ಯೂಟೊ ಡಿ ಅಗ್ರಿಕಲ್ಚುರಾ ಸೊಸ್ಟೆನಿಬಲ್ IAS |
| 8 | ಪರ್ಡ್ಯೂ ವಿಶ್ವವಿದ್ಯಾಲಯ |
| 9 | ರಾಷ್ಟ್ರೀಯ ಸಂಶೋಧನಾ ಮಂಡಳಿ |
| 10 | ದಕ್ಷಿಣ ಚೀನಾ ಕೃಷಿ ವಿಶ್ವವಿದ್ಯಾಲಯ |
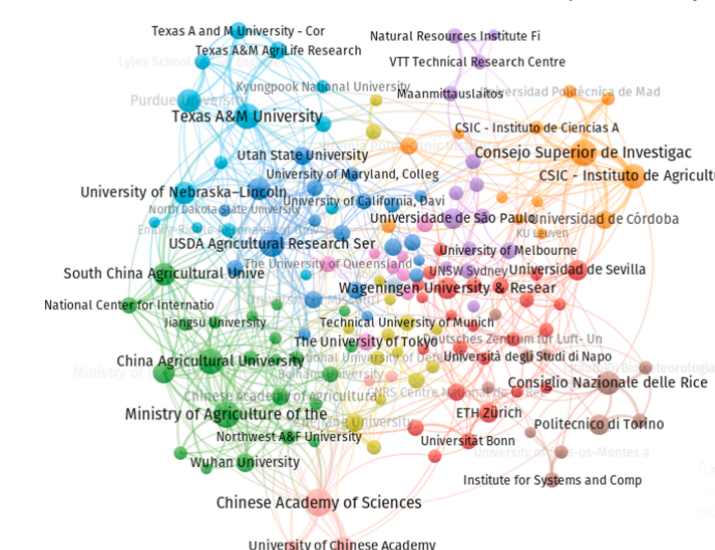
ವಿಶ್ವವಿದ್ಯಾನಿಲಯ ಮತ್ತು ಸಾಂಸ್ಥಿಕ ದೃಷ್ಟಿಕೋನದಿಂದ, ಚೈನೀಸ್ ಅಕಾಡೆಮಿ ಆಫ್ ಸೈನ್ಸಸ್ ಪ್ರಕಟಣೆಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿ ಅಗ್ರಸ್ಥಾನದಲ್ಲಿದೆ, ನಂತರ ಪೀಪಲ್ಸ್ ರಿಪಬ್ಲಿಕ್ ಆಫ್ ಚೀನಾದ ಕೃಷಿ ಸಚಿವಾಲಯ ಮತ್ತು ಕಾನ್ಸೆಜೊ ಸುಪೀರಿಯರ್ ಡಿ ಇನ್ವೆಸ್ಟಿಗಸಿಯೋನ್ಸ್ ಸಿಯೆಂಟಿಫಿಕಾಸ್. ಚೈನೀಸ್ ಅಕಾಡೆಮಿ ಆಫ್ ಸೈನ್ಸಸ್ ಅನ್ನು ಲೇಖಕರಾದ ಲಿಯಾವೊ ಕ್ಸಿಯೋಹಾನ್ ಮತ್ತು ಲಿ ಜುನ್ ಪ್ರತಿನಿಧಿಸುತ್ತಾರೆ; ಹ್ಯಾನ್ ವೆಂಟಿಂಗ್ ಅವರು ಪೀಪಲ್ಸ್ ರಿಪಬ್ಲಿಕ್ ಆಫ್ ಚೀನಾದ ಕೃಷಿ ಸಚಿವಾಲಯವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತಾರೆ; ಮತ್ತು ಕಾನ್ಸೆಜೊ ಸುಪೀರಿಯರ್ ಡಿ ಇನ್ವೆಸ್ಟಿಗಸಿಯನ್ಸ್ ಸಿಯೆಂಟಿಫಿಕಾಸ್ ಅನ್ನು ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್, ´ ಎಫ್. ಮತ್ತು ಪೆನಾ, ˜ ಜೋಸ್ ಮಾರಿಯಾ ಎಸ್. USA ನಿಂದ ಪ್ರತಿನಿಧಿಸುತ್ತಾರೆ, ಟೆಕ್ಸಾಸ್ A&M ವಿಶ್ವವಿದ್ಯಾಲಯ ಮತ್ತು ಪರ್ಡ್ಯೂ ವಿಶ್ವವಿದ್ಯಾಲಯದಂತಹ ವಿಶ್ವವಿದ್ಯಾಲಯಗಳು ತಮ್ಮದನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತವೆ.
ಉಲ್ಲೇಖಿಸಿ. ಅತ್ಯಧಿಕ ಸಂಖ್ಯೆಯ ಪ್ರಕಟಣೆಗಳನ್ನು ಹೊಂದಿರುವ ವಿಶ್ವವಿದ್ಯಾನಿಲಯಗಳು ಮತ್ತು ಅವುಗಳ ಸಂಪರ್ಕಗಳನ್ನು ಚಿತ್ರ 4 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಈ ಪಟ್ಟಿಯು ಕಾನ್ಸಿಗ್ಲಿಯೊ ನಾಜಿಯೋನೇಲ್ ಡೆಲ್ಲೆ ರಿಸರ್ಚೆ ಮತ್ತು ಕಾನ್ಸೆಜೊ ಸುಪೀರಿಯರ್ ಡಿ ಇನ್ವೆಸ್ಟಿಗಸಿಯೋನ್ಸ್ ಸಿಯೆಂಟಿಫಿಕಾಸ್ನಂತಹ ಸಂಸ್ಥೆಗಳನ್ನು ಒಳಗೊಂಡಿದೆ, ಆದರೆ ಅವು ವೈಜ್ಞಾನಿಕ ಸಂಶೋಧನೆಯಲ್ಲಿ ಸಕ್ರಿಯವಾಗಿವೆ, ಆದರೆ ಅವು ಶೈಕ್ಷಣಿಕ ಸಂಸ್ಥೆಗಳಲ್ಲ. .
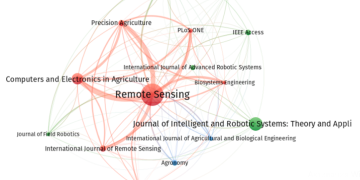
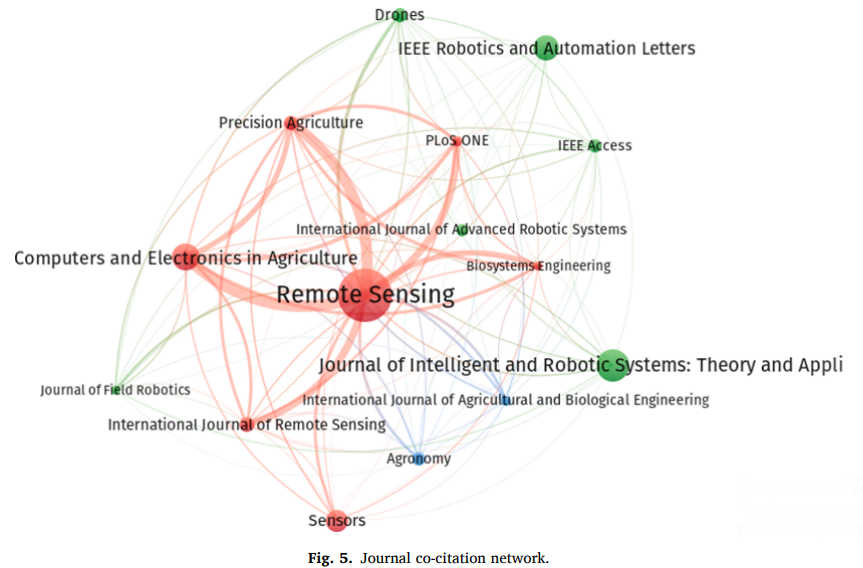
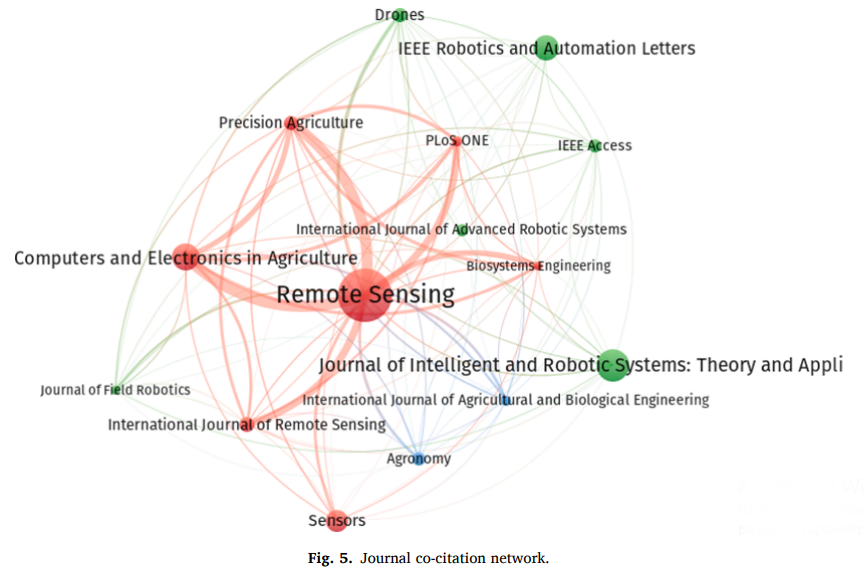
ನಮ್ಮ ಆಯ್ಕೆಯು ವೈವಿಧ್ಯಮಯ ಜರ್ನಲ್ಗಳನ್ನು ಒಳಗೊಂಡಿತ್ತು, ವಾಸ್ತವಿಕವಾಗಿ ಲಭ್ಯವಿರುವ ಎಲ್ಲಾ ಡೇಟಾವನ್ನು ಒಳಗೊಂಡಿದೆ. ಕೋಷ್ಟಕ 8 ರಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ, 258 ಲೇಖನಗಳೊಂದಿಗೆ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಅಗ್ರಸ್ಥಾನದಲ್ಲಿದೆ, ನಂತರ ಜರ್ನಲ್ ಆಫ್ ಇಂಟೆಲಿಜೆಂಟ್ ಮತ್ತು ರೊಬೊಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್: ಸಿದ್ಧಾಂತ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳು 126 ಮತ್ತು 98 ಲೇಖನಗಳೊಂದಿಗೆ ಕೃಷಿಯಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ಗಳು ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಹೆಚ್ಚಾಗಿ ಡ್ರೋನ್ಗಳ ಅಪ್ಲಿಕೇಶನ್ ಮತ್ತು ಅಭಿವೃದ್ಧಿಯ ಮೇಲೆ ಕೇಂದ್ರೀಕೃತವಾಗಿದ್ದರೆ, ಕೃಷಿಯಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ಗಳು ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಮುಖ್ಯವಾಗಿ ಕಂಪ್ಯೂಟರ್ ಹಾರ್ಡ್ವೇರ್, ಸಾಫ್ಟ್ವೇರ್, ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಮತ್ತು ಕೃಷಿಯಲ್ಲಿನ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿನ ಪ್ರಗತಿಯನ್ನು ಒಳಗೊಂಡಿದೆ. 87 ಪ್ರಕಟಣೆಗಳೊಂದಿಗೆ IEEE ರೊಬೊಟಿಕ್ಸ್ ಮತ್ತು ಆಟೋಮೇಷನ್ ಲೆಟರ್ಸ್ ಮತ್ತು 34 ಪ್ರಕಟಣೆಗಳೊಂದಿಗೆ IEEE ಪ್ರವೇಶದಂತಹ ಕ್ರಾಸ್-ಏರಿಯಾ ಔಟ್ಲೆಟ್ಗಳು ಸಹ ಕ್ಷೇತ್ರದಲ್ಲಿ ಪ್ರಮುಖ ಮಳಿಗೆಗಳಾಗಿವೆ. ಅಗ್ರ ಹದಿನೈದು ಮಳಿಗೆಗಳು 959 ದಾಖಲೆಗಳೊಂದಿಗೆ ಸಾಹಿತ್ಯಕ್ಕೆ ಕೊಡುಗೆ ನೀಡಿವೆ, ಇದು ಎಲ್ಲಾ ಪ್ರಕಟಣೆಗಳಲ್ಲಿ ಸರಿಸುಮಾರು 20.40% ಆಗಿದೆ. ಜರ್ನಲ್ ಸಹ-ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ಪ್ರಕಟಣೆಗಳ ನಡುವಿನ ಪ್ರಾಮುಖ್ಯತೆ ಮತ್ತು ಹೋಲಿಕೆಯನ್ನು ಪರೀಕ್ಷಿಸಲು ನಮಗೆ ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಸಹ-ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯು ಚಿತ್ರ 5 ರಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ ಮೂರು ಕ್ಲಸ್ಟರ್ಗಳನ್ನು ನೀಡುತ್ತದೆ. ಕೆಂಪು ಕ್ಲಸ್ಟರ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್, ಕಂಪ್ಯೂಟರ್ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಇನ್ ಅಗ್ರಿಕಲ್ಚರ್, ಸೆನ್ಸರ್ಗಳಂತಹ ಜರ್ನಲ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ.
ಮತ್ತು ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್. ಈ ಎಲ್ಲಾ ಮಳಿಗೆಗಳು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಯ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಹೆಚ್ಚು ಹೆಸರುವಾಸಿಯಾದ ಜರ್ನಲ್ಗಳಾಗಿವೆ. ಹಸಿರು ಕ್ಲಸ್ಟರ್ ರೋಬೋಟಿಕ್ಸ್ನೊಂದಿಗೆ ವ್ಯವಹರಿಸುವ ಜರ್ನಲ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ, ಉದಾಹರಣೆಗೆ ಜರ್ನಲ್ ಆಫ್ ಇಂಟೆಲಿಜೆಂಟ್ ಮತ್ತು ರೊಬೊಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್: ಥಿಯರಿ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳು, ಐಇಇಇ ರೊಬೊಟಿಕ್ಸ್ ಮತ್ತು ಆಟೊಮೇಷನ್ ಲೆಟರ್ಸ್, ಐಇಇಇ ಆಕ್ಸೆಸ್ ಮತ್ತು ಡ್ರೋನ್ಸ್. ಈ ಮಳಿಗೆಗಳು ಹೆಚ್ಚಾಗಿ ಯಾಂತ್ರೀಕೃತಗೊಂಡ ಪತ್ರಿಕೆಗಳನ್ನು ಪ್ರಕಟಿಸುತ್ತವೆ ಮತ್ತು ಕೃಷಿ ಎಂಜಿನಿಯರ್ಗಳಿಗೆ ಉಪಯುಕ್ತವಾಗಿವೆ. ಅಗ್ರಿಕಲ್ಚರಲ್ ಅಂಡ್ ಬಯೋಲಾಜಿಕಲ್ ಇಂಜಿನಿಯರಿಂಗ್ನ ಇಂಟರ್ನ್ಯಾಶನಲ್ ಜರ್ನಲ್ನಂತಹ ಅಗ್ರೋನಮಿ ಮತ್ತು ಅಗ್ರಿಕಲ್ಚರ್ ಇಂಜಿನಿಯರಿಂಗ್ಗೆ ಸಂಬಂಧಿಸಿದ ಜರ್ನಲ್ಗಳಿಂದ ಅಂತಿಮ ಕ್ಲಸ್ಟರ್ ಅನ್ನು ರಚಿಸಲಾಗಿದೆ.
ಕೃಷಿ ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಂಶೋಧನೆಯಲ್ಲಿ ಟಾಪ್ 15 ಜರ್ನಲ್ಗಳು.
| ಶ್ರೇಣಿ | ಜರ್ನಲ್ | ಎಣಿಕೆ |
| 1 | ದೂರ ಸಂವೇದಿ | 258 |
| 2 | ಜರ್ನಲ್ ಆಫ್ ಇಂಟೆಲಿಜೆಂಟ್ ಮತ್ತು ರೊಬೊಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್: ಥಿಯರಿ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳು | 126 |
| 3 | ಕೃಷಿಯಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ | 98 |
| 4 | IEEE ರೊಬೊಟಿಕ್ಸ್ ಮತ್ತು ಆಟೊಮೇಷನ್ ಪತ್ರಗಳು | 87 |
| 5 | ಸಂವೇದಕ | 73 |
| 6 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ | 42 |
| 7 | ನಿಖರ ಕೃಷಿ | 41 |
| 8 | ಡ್ರೋನ್ಸ್ | 40 |
| 9 | ಕೃಷಿಯ | 34 |
| 10 | IEEE ಪ್ರವೇಶ | 34 |
| 11 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ಅಡ್ವಾನ್ಸ್ಡ್ ರೋಬೋಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್ | 31 |
| 12 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ಅಗ್ರಿಕಲ್ಚರಲ್ ಅಂಡ್ ಬಯೋಲಾಜಿಕಲ್ ಇಂಜಿನಿಯರಿಂಗ್ | 25 |
| 13 | PLOS ಒನ್ | 25 |
| 14 | ಜರ್ನಲ್ ಆಫ್ ಫೀಲ್ಡ್ ರೊಬೊಟಿಕ್ಸ್ | 23 |
| 15 | ಬಯೋಸಿಸ್ಟಮ್ಸ್ ಎಂಜಿನಿಯರಿಂಗ್ | 23 |
ತೀರ್ಮಾನ
ಸಾರಾಂಶ
ಈ ಅಧ್ಯಯನದಲ್ಲಿ, ನಾವು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಕುರಿತು ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಂಶೋಧನೆಗಳನ್ನು ಸಂಕ್ಷಿಪ್ತಗೊಳಿಸಿದ್ದೇವೆ ಮತ್ತು ವಿಶ್ಲೇಷಿಸಿದ್ದೇವೆ. ವಿವಿಧ ಗ್ರಂಥಮಾಪನ ತಂತ್ರಗಳನ್ನು ಅನ್ವಯಿಸಿ, ಕೃಷಿ ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಂಶೋಧನೆಯ ಬೌದ್ಧಿಕ ರಚನೆಯ ಬಗ್ಗೆ ಉತ್ತಮ ತಿಳುವಳಿಕೆಯನ್ನು ಪಡೆಯಲು ನಾವು ಶ್ರಮಿಸಿದ್ದೇವೆ. ಒಟ್ಟಾರೆಯಾಗಿ, ನಮ್ಮ ವಿಮರ್ಶೆಯು ಸಾಹಿತ್ಯದಲ್ಲಿನ ಕೀವರ್ಡ್ಗಳನ್ನು ಗುರುತಿಸುವ ಮತ್ತು ಚರ್ಚಿಸುವ ಮೂಲಕ ಹಲವಾರು ಕೊಡುಗೆಗಳನ್ನು ನೀಡುತ್ತದೆ, ಡ್ರೋನ್ಗಳ ಕ್ಷೇತ್ರದಲ್ಲಿ ಶಬ್ದಾರ್ಥವಾಗಿ ಒಂದೇ ರೀತಿಯ ಸಮುದಾಯಗಳನ್ನು ರಚಿಸುವಾಗ ಜ್ಞಾನ ಸಮೂಹಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುವುದು, ಹಿಂದಿನ ಸಂಶೋಧನೆಯನ್ನು ವಿವರಿಸುವುದು ಮತ್ತು ಭವಿಷ್ಯದ ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳನ್ನು ಸೂಚಿಸುತ್ತದೆ. ಕೆಳಗೆ, ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಅಭಿವೃದ್ಧಿಯ ವಿಮರ್ಶೆಯ ಮುಖ್ಯ ಸಂಶೋಧನೆಗಳನ್ನು ನಾವು ರೂಪಿಸುತ್ತೇವೆ:
• ಒಟ್ಟಾರೆ ಸಾಹಿತ್ಯವು 2012 ರ ನಂತರದ ಲೇಖನಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿನ ಏರಿಕೆಯಿಂದ ಸೂಚಿಸಲ್ಪಟ್ಟಂತೆ ಕಳೆದ ದಶಕದಲ್ಲಿ ವೇಗವಾಗಿ ಬೆಳೆದಿದೆ ಮತ್ತು ಅಗಾಧ ಗಮನವನ್ನು ಸೆಳೆದಿದೆ. ಈ ಜ್ಞಾನ ಕ್ಷೇತ್ರವು ಅದರ ಪೂರ್ಣ ಪ್ರಬುದ್ಧತೆಯನ್ನು ಇನ್ನೂ ಪಡೆಯದಿದ್ದರೂ (ಬ್ಯಾರಿಯೆಂಟೋಸ್ ಮತ್ತು ಇತರರು, 2011; ಮೇಸ್ & ಸ್ಟೆಪ್ಪೆ, 2019), ಹಲವಾರು ಪ್ರಶ್ನೆಗಳಿಗೆ ಇನ್ನೂ ಉತ್ತರಿಸಲಾಗಿಲ್ಲ. ಉದಾಹರಣೆಗೆ, ಒಳಾಂಗಣ ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ಗಳ ಉಪಯುಕ್ತತೆಯು ಇನ್ನೂ ಚರ್ಚೆಗೆ ಮುಕ್ತವಾಗಿದೆ (ಅಸ್ಲಾನ್ ಮತ್ತು ಇತರರು, 2022; ಕ್ರುಲ್ ಮತ್ತು ಇತರರು, 2021; ರೋಲ್ಡ್ ಆನ್ ಮತ್ತು ಇತರರು., 2015). ಕ್ಷೇತ್ರಗಳ ದೃಶ್ಯಗಳ ಸಂಕೀರ್ಣತೆ ಮತ್ತು ವಿಭಿನ್ನ ಚಿತ್ರಣ ಸನ್ನಿವೇಶಗಳು (ಉದಾ, ನೆರಳುಗಳು ಮತ್ತು ಪ್ರಕಾಶ) ಹೆಚ್ಚಿನ ಸ್ಪೆಕ್ಟ್ರಲ್ ಇನ್-ಕ್ಲಾಸ್ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು (ಯಾವೊ ಮತ್ತು ಇತರರು, 2019). ನಂತರದ ಸಂಶೋಧನಾ ಹಂತಗಳಲ್ಲಿಯೂ ಸಹ, ನಿರ್ದಿಷ್ಟ ಸನ್ನಿವೇಶಗಳು ಮತ್ತು ಅಗತ್ಯವಿರುವ ಚಿತ್ರದ ಗುಣಮಟ್ಟಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಸೂಕ್ತವಾದ ವಿಮಾನ ಯೋಜನೆಗಳನ್ನು ನಿರ್ಧರಿಸಲು ಸಂಶೋಧಕರಿಗೆ ಸವಾಲು ಹಾಕಲಾಗಿದೆ (ಸೋರೆಸ್ ಮತ್ತು ಇತರರು, 2021; ತು ಮತ್ತು ಇತರರು.,
2020).
• ಕ್ಷೇತ್ರವು ಸಮರ್ಥ UAV ವ್ಯವಸ್ಥೆಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವುದರಿಂದ ಯಂತ್ರ ಕಲಿಕೆ ಮತ್ತು ಕೃಷಿ ಡ್ರೋನ್ಗಳ ವಿನ್ಯಾಸದಲ್ಲಿ ಆಳವಾದ ಕಲಿಕೆಯಂತಹ AI ತಂತ್ರಗಳನ್ನು ಸಂಯೋಜಿಸುವವರೆಗೆ ಪ್ರಗತಿ ಸಾಧಿಸಿರುವುದನ್ನು ನಾವು ಗಮನಿಸಿದ್ದೇವೆ (ಬಹ್ ಮತ್ತು ಇತರರು, 2018; ಕಿಟಾನೊ ಮತ್ತು ಇತರರು, 2019; ಮೈಮೈತಿಜಿಯಾಂಗ್ ಮತ್ತು ಇತರರು. , 2020; ಮಜ್ಜಿಯಾ ಮತ್ತು ಇತರರು, 2020; ಟೆಟಿಲಾ ಮತ್ತು ಇತರರು, 2020).
• ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮೇಲಿನ ಸಂಶೋಧನೆಯು ಪರಿಸರದ ಮೇಲ್ವಿಚಾರಣೆ, ಬೆಳೆ ನಿರ್ವಹಣೆ ಮತ್ತು ಕಳೆ ನಿರ್ವಹಣೆ (ಕ್ಲಸ್ಟರ್ 1) ಹಾಗೂ ರಿಮೋಟ್ ಫಿನೋಟೈಪಿಂಗ್ ಮತ್ತು ಇಳುವರಿ ಅಂದಾಜು (ಕ್ಲಸ್ಟರ್ 2) ನಲ್ಲಿ ತಂತ್ರಜ್ಞಾನದ ಸಂಭಾವ್ಯತೆಯನ್ನು ಅನ್ವೇಷಿಸುವ ಮೂಲಕ ದೂರಸಂವೇದಿಯನ್ನು ಪ್ರಧಾನವಾಗಿ ಚರ್ಚಿಸಲಾಗಿದೆ. ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಮೇಲೆ ಪ್ರಭಾವಶಾಲಿ ಅಧ್ಯಯನಗಳ ಒಂದು ಸೆಟ್ ಆಸ್ಟಿನ್ (2010), ಬರ್ನಿ ಮತ್ತು ಇತರರು. (2009)a, ಹರ್ವಿಟ್ಜ್ ಮತ್ತು ಇತರರು. (2004), Nex and Remondino (2014), ಮತ್ತು Zhang and Kovacs (2012). ಈ ಅಧ್ಯಯನಗಳು ಕೃಷಿಯ ಸಂದರ್ಭದಲ್ಲಿ ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಂಶೋಧನೆಯ ಪರಿಕಲ್ಪನಾ ಆಧಾರವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದವು.
• ವಿಧಾನಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ, ಇಲ್ಲಿಯವರೆಗೆ ಮಾಡಲಾದ ಹೆಚ್ಚಿನ ಸಂಶೋಧನೆಯು ಸಿಸ್ಟಮ್ ವಿನ್ಯಾಸ, ಪರಿಕಲ್ಪನಾ ಅಥವಾ ವಿಮರ್ಶೆ-ಆಧಾರಿತ ಅಧ್ಯಯನಗಳಿಂದ ಸಂಯೋಜಿಸಲ್ಪಟ್ಟಿದೆ ಎಂದು ನಾವು ಗಮನಿಸಿದ್ದೇವೆ (Inouue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; ಯಾವೋ ಮತ್ತು ಇತರರು, 2019). ಕೃಷಿ ಡ್ರೋನ್ಗಳನ್ನು ತನಿಖೆ ಮಾಡುವಲ್ಲಿ ಪ್ರಾಯೋಗಿಕ, ಗುಣಾತ್ಮಕ ಮತ್ತು ಕೇಸ್-ಸ್ಟಡಿ-ಆಧಾರಿತ ವಿಧಾನಗಳ ಕೊರತೆಯನ್ನು ನಾವು ಗಮನಿಸುತ್ತೇವೆ.
• ಇತ್ತೀಚೆಗೆ, ನಿಖರವಾದ ಕೃಷಿ, AI ತಂತ್ರಗಳು, ನಿಖರವಾದ ವೈಟಿಕಲ್ಚರ್ ಮತ್ತು ನೀರಿನ ಒತ್ತಡದ ಮೌಲ್ಯಮಾಪನಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ವಿಷಯಗಳು ಗಣನೀಯ ಗಮನವನ್ನು ಸೆಳೆದಿವೆ (ಎಸ್ಪಿನೋಜಾ ಮತ್ತು ಇತರರು, 2017; ಗೊಮೆಜ್-ಕ್ಯಾಂಡ್ ´ ಇತರರು, 2016; ಮೇಟೆಸ್ ಮತ್ತು ಇತರರು, 2015; ಮೇಟ್ಸೆ & ಡಿ ಗೆನ್ನಾರೊ, 2018, 2021; Z. ಝೌ ಮತ್ತು ಇತರರು, 2021). 1990-2010 ಮತ್ತು 2011-2021 ಎಂಬ ಎರಡು ಪ್ರತ್ಯೇಕ ಯುಗಗಳಲ್ಲಿನ ಸಂಶೋಧನಾ ಸಮೂಹಗಳ ಎಚ್ಚರಿಕೆಯಿಂದ ಪರಿಶೀಲನೆಯು ಡೊಮೇನ್ನ ಬೌದ್ಧಿಕ ರಚನೆಯ ಪ್ರಗತಿಯನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. 1990 ರಿಂದ 2010 ರ ಅವಧಿಯು ಕೇಂದ್ರ ಕಲ್ಪನೆಗಳು ಮತ್ತು ಡ್ರೋನ್ಗಳ ಪರಿಕಲ್ಪನೆಗಳ ರಚನೆಯನ್ನು ರೂಪಿಸಿತು, ಇದು UAV ವಿನ್ಯಾಸ, ಅಭಿವೃದ್ಧಿ ಮತ್ತು ಅನುಷ್ಠಾನದ ಚರ್ಚೆಯಿಂದ ಸ್ಪಷ್ಟವಾಗಿದೆ. ಎರಡನೆಯ ಯುಗದಲ್ಲಿ, ಕೃಷಿಯಲ್ಲಿ UAV ಬಳಕೆಯ ಪ್ರಕರಣಗಳನ್ನು ಸಂಶ್ಲೇಷಿಸುವ ಪ್ರಯತ್ನವನ್ನು ಮಾಡುವ ಮೂಲಕ ಸಂಶೋಧನಾ ಗಮನವು ಪೂರ್ವ ಅಧ್ಯಯನಗಳ ಮೇಲೆ ವಿಸ್ತರಿಸುತ್ತದೆ. ಇಮೇಜಿಂಗ್ ಕಾರ್ಯಗಳು ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳನ್ನು ಚರ್ಚಿಸುವ ಹಲವಾರು ಅಧ್ಯಯನಗಳನ್ನು ನಾವು ಕಂಡುಕೊಂಡಿದ್ದೇವೆ.
| ಶ್ರೇಣಿ | ಜರ್ನಲ್ | ಎಣಿಕೆ |
| 1 | ದೂರ ಸಂವೇದಿ | 258 |
| 2 | ಜರ್ನಲ್ ಆಫ್ ಇಂಟೆಲಿಜೆಂಟ್ ಮತ್ತು ರೊಬೊಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್: ಥಿಯರಿ ಮತ್ತು | 126 |
| ಅಪ್ಲಿಕೇಶನ್ಗಳು | ||
| 3 | ಕೃಷಿಯಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ | 98 |
| 4 | IEEE ರೊಬೊಟಿಕ್ಸ್ ಮತ್ತು ಆಟೊಮೇಷನ್ ಪತ್ರಗಳು | 87 |
| 5 | ಸಂವೇದಕ | 73 |
| 6 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ | 42 |
| 7 | ನಿಖರ ಕೃಷಿ | 41 |
| 8 | ಡ್ರೋನ್ಸ್ | 40 |
| 9 | ಕೃಷಿಯ | 34 |
| 10 | IEEE ಪ್ರವೇಶ | 34 |
| 11 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ಅಡ್ವಾನ್ಸ್ಡ್ ರೋಬೋಟಿಕ್ ಸಿಸ್ಟಮ್ಸ್ | 31 |
| 12 | ಇಂಟರ್ನ್ಯಾಷನಲ್ ಜರ್ನಲ್ ಆಫ್ ಅಗ್ರಿಕಲ್ಚರಲ್ ಅಂಡ್ ಬಯೋಲಾಜಿಕಲ್ ಇಂಜಿನಿಯರಿಂಗ್ | 25 |
| 13 | PLOS ಒನ್ | 25 |
| 14 | ಜರ್ನಲ್ ಆಫ್ ಫೀಲ್ಡ್ ರೊಬೊಟಿಕ್ಸ್ | 23 |
| 15 | ಬಯೋಸಿಸ್ಟಮ್ಸ್ ಎಂಜಿನಿಯರಿಂಗ್ | 22 |
ಪರಿಣಾಮಗಳು
ವಿದ್ವಾಂಸರು, ರೈತರು, ಕೃಷಿ ತಜ್ಞರು, ಬೆಳೆ ಸಲಹೆಗಾರರು ಮತ್ತು UAV ಸಿಸ್ಟಮ್ ವಿನ್ಯಾಸಕರನ್ನು ಗಮನದಲ್ಲಿಟ್ಟುಕೊಂಡು ನಮ್ಮ ಗ್ರಂಥಮಾಪನ ವಿಮರ್ಶೆಯನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ ಮತ್ತು ನಡೆಸಲಾಗಿದೆ. ಲೇಖಕರ ಅತ್ಯುತ್ತಮ ಜ್ಞಾನಕ್ಕೆ, ಇದು ಆಳವಾದ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಕೈಗೊಂಡ ಮೊದಲ ಮೂಲ ವಿಮರ್ಶೆಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳು. ನಾವು ಈ ಜ್ಞಾನ ಸಂಸ್ಥೆಯ ಸಮಗ್ರ ವಿಮರ್ಶೆಯನ್ನು ನಡೆಸಿದ್ದೇವೆ, ಪ್ರಕಟಣೆಗಳ ಉಲ್ಲೇಖ ಮತ್ತು ಸಹ-ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಗಳನ್ನು ಬಳಸಿಕೊಳ್ಳುತ್ತೇವೆ. ಡ್ರೋನ್ ಸಂಶೋಧನೆಯ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ವಿವರಿಸುವ ನಮ್ಮ ಪ್ರಯತ್ನಗಳು ಶಿಕ್ಷಣತಜ್ಞರಿಗೆ ಹೊಸ ಒಳನೋಟಗಳನ್ನು ನೀಡುತ್ತವೆ. ಕಾಲಾನಂತರದಲ್ಲಿ ಬಳಸಿದ ಕೀವರ್ಡ್ಗಳ ಎಚ್ಚರಿಕೆಯ ವಿಮರ್ಶೆಯು ಡ್ರೋನ್-ಸಂಬಂಧಿತ ಸಾಹಿತ್ಯದಲ್ಲಿ ಹಾಟ್ಸ್ಪಾಟ್ಗಳು ಮತ್ತು ಫೋಕಲ್ ಸಂಶೋಧನಾ ಪ್ರದೇಶಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. ಇದಲ್ಲದೆ, ಕ್ಷೇತ್ರದಲ್ಲಿ ಪೂರ್ಣಗೊಂಡ ಅತ್ಯಂತ ಪ್ರಭಾವಶಾಲಿ ಸಂಶೋಧನಾ ಕಾರ್ಯಗಳನ್ನು ಗುರುತಿಸಲು ನಾವು ಹೆಚ್ಚು ಉಲ್ಲೇಖಿಸಿದ ಅಧ್ಯಯನಗಳ ಪಟ್ಟಿಯನ್ನು ಪ್ರಸ್ತುತಪಡಿಸುತ್ತೇವೆ. ಲೇಖನಗಳು ಮತ್ತು ಕೀವರ್ಡ್ಗಳ ಗುರುತಿಸುವಿಕೆಯು ಭವಿಷ್ಯದ ಅಧ್ಯಯನಗಳಿಗೆ ಹಲವಾರು ಮಾರ್ಗಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು ಒಂದು ಘನ ಆರಂಭಿಕ ಹಂತವನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಮುಖ್ಯವಾಗಿ, ಹೋಲಿಸಬಹುದಾದ ಕೃತಿಗಳನ್ನು ವರ್ಗೀಕರಿಸುವ ಮತ್ತು ಫಲಿತಾಂಶಗಳನ್ನು ವಿವರಿಸುವ ಕ್ಲಸ್ಟರ್ಗಳನ್ನು ನಾವು ಬಹಿರಂಗಪಡಿಸಿದ್ದೇವೆ. ಸಮೂಹಗಳಲ್ಲಿ ವರ್ಗೀಕರಿಸಲಾದ ಅಧ್ಯಯನಗಳು UAV ಸಂಶೋಧನೆಯ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಸಹಾಯ ಮಾಡುತ್ತವೆ. ಗಮನಾರ್ಹವಾಗಿ, ಡ್ರೋನ್ಗಳ ಅಳವಡಿಕೆ ಅಂಶಗಳನ್ನು ತನಿಖೆ ಮಾಡುವ ಅಧ್ಯಯನಗಳ ಕೊರತೆಯನ್ನು ನಾವು ಕಂಡುಹಿಡಿದಿದ್ದೇವೆ
ಮತ್ತು ಕೃಷಿ ಚಟುವಟಿಕೆಗಳಲ್ಲಿನ ಅಡೆತಡೆಗಳು (ಕೋಷ್ಟಕ 9 ನೋಡಿ). ಭವಿಷ್ಯದ ಸಂಶೋಧಕರು ವಿಭಿನ್ನ ಕೃಷಿ ಚಟುವಟಿಕೆಗಳು ಮತ್ತು ಹವಾಮಾನ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಡ್ರೋನ್ಗಳನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುವ ಅಂಶಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವ ಪ್ರಾಯೋಗಿಕ ತನಿಖೆಗಳನ್ನು ನಡೆಸುವ ಮೂಲಕ ಈ ಸಂಭಾವ್ಯ ಅಂತರವನ್ನು ಪರಿಹರಿಸಬಹುದು. ಇದಲ್ಲದೆ, ಡ್ರೋನ್ಗಳ ಪರಿಣಾಮಕಾರಿತ್ವದ ಬಗ್ಗೆ ಕೇಸ್ ಸ್ಟಡಿ ಆಧಾರಿತ ಸಂಶೋಧನೆಯು ಕ್ಷೇತ್ರದಿಂದ ನೈಜ ಡೇಟಾದೊಂದಿಗೆ ಬೆಂಬಲಿತವಾಗಿರಬೇಕು. ಅಲ್ಲದೆ, ಶೈಕ್ಷಣಿಕ ಸಂಶೋಧನೆಯಲ್ಲಿ ರೈತರು ಮತ್ತು ವ್ಯವಸ್ಥಾಪಕರನ್ನು ಒಳಗೊಳ್ಳುವುದು ಡ್ರೋನ್ ಸಂಶೋಧನೆಯ ಸೈದ್ಧಾಂತಿಕ ಮತ್ತು ಪ್ರಾಯೋಗಿಕ ಪ್ರಗತಿಗೆ ಅನುಕೂಲಕರವಾಗಿರುತ್ತದೆ. ನಾವು ಅತ್ಯಂತ ಪ್ರಮುಖ ಸಂಶೋಧಕರು ಮತ್ತು ಅವರ ಕೊಡುಗೆಗಳನ್ನು ಗುರುತಿಸಲು ಸಾಧ್ಯವಾಯಿತು, ಇದು ಮೌಲ್ಯಯುತವಾಗಿದೆ ಏಕೆಂದರೆ ಇತ್ತೀಚಿನ ಮೂಲ ಕೃತಿಗಳ ಅರಿವು ಭವಿಷ್ಯದ ಶೈಕ್ಷಣಿಕ ಪ್ರಯತ್ನಗಳಿಗೆ ಕೆಲವು ಮಾರ್ಗದರ್ಶನವನ್ನು ನೀಡುತ್ತದೆ.
ಟೇಬಲ್ 9
UAV ಅಳವಡಿಕೆ ತಡೆಗಳು.
| ತಡೆಗೋಡೆ | ವಿವರಣೆ |
| ಡೇಟಾ ಸುರಕ್ಷತೆ | ಅನುಷ್ಠಾನಕ್ಕೆ ಸೈಬರ್ ಭದ್ರತೆ ಒಂದು ದೊಡ್ಡ ಸವಾಲಾಗಿದೆ IoT ಪರಿಹಾರಗಳು (ಮಸ್ರೂರ್ ಮತ್ತು ಇತರರು, 2021). |
| ಪರಸ್ಪರ ಕಾರ್ಯಸಾಧ್ಯತೆ ಮತ್ತು ಏಕೀಕರಣ | UAV, WSN, IoT, ಮುಂತಾದ ವಿವಿಧ ತಂತ್ರಜ್ಞಾನಗಳು. ಸಂಯೋಜಿತವಾಗಿರಬೇಕು ಮತ್ತು ಡೇಟಾವನ್ನು ರವಾನಿಸಬೇಕು ಸಂಕೀರ್ಣತೆಯ ಮಟ್ಟವನ್ನು ಹೆಚ್ಚಿಸಿ (Alsamhi et al., 2021; ಪೋಪೆಸ್ಕು ಮತ್ತು ಇತರರು, 2020; ವುರಾನ್ ಮತ್ತು ಇತರರು, 2018). |
| ಅನುಷ್ಠಾನ ವೆಚ್ಚಗಳು | ಇದು ಸಣ್ಣ ರೈತರಿಗೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟವಾಗಿ ಅನ್ವಯಿಸುತ್ತದೆ ವಿವಿಧ ಅತ್ಯಾಧುನಿಕ ತಂತ್ರಜ್ಞಾನಗಳನ್ನು ಸಂಯೋಜಿಸುವುದು ( ಮಸ್ರೂರ್ ಮತ್ತು ಇತರರು, 2021). |
| ಕಾರ್ಮಿಕ ಜ್ಞಾನ ಮತ್ತು ಪರಿಣತಿ | ಯುಎವಿಗಳನ್ನು ನಿರ್ವಹಿಸಲು ನುರಿತ ಡ್ರೋನ್ ಪೈಲಟ್ಗಳ ಅಗತ್ಯವಿದೆ. ಅಲ್ಲದೆ, ವಿವಿಧ ಅತ್ಯಾಧುನಿಕ ಕಾರ್ಯಗಳನ್ನು ಅನುಷ್ಠಾನಗೊಳಿಸುತ್ತಿದೆ ತಂತ್ರಜ್ಞಾನಗಳಿಗೆ ನುರಿತ ಕೆಲಸಗಾರರ ಅಗತ್ಯವಿದೆ (YB ಹುವಾಂಗ್ ಮತ್ತು ಇತರರು, 2013; ಟ್ಸೌರೋಸ್ ಮತ್ತು ಇತರರು, 2019). |
| ಎಂಜಿನ್ ಶಕ್ತಿ ಮತ್ತು ಹಾರಾಟ ಅವಧಿ | ಡ್ರೋನ್ಗಳನ್ನು ದೀರ್ಘ ಗಂಟೆಗಳ ಕಾಲ ಮತ್ತು ಕವರ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ ದೊಡ್ಡ ಪ್ರದೇಶಗಳು (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| ಸ್ಥಿರತೆ, ವಿಶ್ವಾಸಾರ್ಹತೆ ಮತ್ತು ಕುಶಲತೆ | ಕೆಟ್ಟ ಹವಾಮಾನ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಡ್ರೋನ್ಗಳು ಸ್ಥಿರವಾಗಿರುವುದಿಲ್ಲ (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| ಪೇಲೋಡ್ ಮಿತಿಗಳು ಮತ್ತು ಸಂವೇದಕಗಳ ಗುಣಮಟ್ಟ | ಡ್ರೋನ್ಗಳು ಸೀಮಿತ ಹೊರೆಗಳನ್ನು ಮಾತ್ರ ಸಾಗಿಸಬಲ್ಲವು ಕಡಿಮೆ ಗುಣಮಟ್ಟದ ಸಂವೇದಕಗಳನ್ನು ಲೋಡ್ ಮಾಡುವ ಸಾಮರ್ಥ್ಯ (ನೆಬಿಕರ್ ಮತ್ತು ಇತರರು, 2008). |
| ನಿಯಂತ್ರಣ | ಡ್ರೋನ್ಗಳು ಅಪಾಯಕಾರಿಯೂ ಆಗಿರುವುದರಿಂದ ತೀವ್ರತರವಾದವುಗಳೂ ಇವೆ ಕೆಲವು ಪ್ರದೇಶಗಳಲ್ಲಿ ನಿಯಮಗಳು (ಹಾರ್ಡಿನ್ & ಜೆನ್ಸನ್, 2011; ಲಾಲಿಬರ್ಟೆ ಮತ್ತು ರಂಗೋ, 2011). |
| ರೈತರ ಜ್ಞಾನ ಮತ್ತು ಆಸಕ್ತಿ | ಇತರ ಅತ್ಯಾಧುನಿಕ ತಂತ್ರಜ್ಞಾನಗಳಂತೆ, ಡ್ರೋನ್ಗಳು ಯಶಸ್ವಿ ಅನುಷ್ಠಾನಕ್ಕೆ ಪರಿಣತಿ ಮತ್ತು ಸಹ ಅಗತ್ಯವಿದೆ ಅನಿಶ್ಚಿತತೆಗಳೊಂದಿಗೆ (ಫಿಶರ್ ಮತ್ತು ಇತರರು, 2009; ಲ್ಯಾಂಬರ್ಟ್ ಮತ್ತು ಇತರರು, 2004; ಸ್ಟಾಫರ್ಡ್, 2000). |
ಇಳುವರಿಯನ್ನು ಹೆಚ್ಚಿಸಲು ಲಭ್ಯವಿರುವ ಸಂಪನ್ಮೂಲಗಳನ್ನು ಸಮರ್ಥವಾಗಿ ಬಳಸಿಕೊಳ್ಳುವ ನಿರಂತರ ಅಗತ್ಯವಿರುವುದರಿಂದ, ರೈತರು ತಮ್ಮ ಹೊಲಗಳ ತ್ವರಿತ, ನಿಖರ ಮತ್ತು ವೆಚ್ಚ-ಪರಿಣಾಮಕಾರಿ ಸ್ಕ್ಯಾನಿಂಗ್ ಅನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಡ್ರೋನ್ಗಳ ಲಾಭವನ್ನು ಪಡೆಯಬಹುದು. ತಂತ್ರಜ್ಞಾನವು ರೈತರಿಗೆ ತಮ್ಮ ಬೆಳೆಗಳ ಸ್ಥಿತಿಯನ್ನು ನಿರ್ಧರಿಸಲು ಮತ್ತು ನೀರಿನ ಸ್ಥಿತಿ, ಹಣ್ಣಾಗುವ ಹಂತ, ಕೀಟಗಳ ಮುತ್ತಿಕೊಳ್ಳುವಿಕೆ ಮತ್ತು ಪೌಷ್ಟಿಕಾಂಶದ ಅಗತ್ಯಗಳನ್ನು ನಿರ್ಣಯಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ. ಡ್ರೋನ್ಗಳ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಸಾಮರ್ಥ್ಯಗಳು ರೈತರಿಗೆ ಆರಂಭಿಕ ಹಂತದಲ್ಲಿ ಸಮಸ್ಯೆಗಳನ್ನು ನಿರೀಕ್ಷಿಸಲು ಮತ್ತು ತಕ್ಷಣವೇ ಸೂಕ್ತ ಮಧ್ಯಸ್ಥಿಕೆಗಳನ್ನು ಮಾಡಲು ನಿರ್ಣಾಯಕ ಡೇಟಾವನ್ನು ಒದಗಿಸುತ್ತದೆ. ಆದಾಗ್ಯೂ, ಸವಾಲುಗಳನ್ನು ಸರಿಯಾಗಿ ಎದುರಿಸಿದರೆ ಮಾತ್ರ ತಂತ್ರಜ್ಞಾನದ ಪ್ರಯೋಜನಗಳನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು. ಬೆಳಕಿನಲ್ಲಿ
ಡೇಟಾ ಸುರಕ್ಷತೆ, ಸಂವೇದಕ ತಂತ್ರಜ್ಞಾನದ ಸಮಸ್ಯೆಗಳು (ಉದಾ, ಮಾಪನಗಳ ವಿಶ್ವಾಸಾರ್ಹತೆ ಅಥವಾ ನಿಖರತೆ), ಏಕೀಕರಣದ ಸಂಕೀರ್ಣತೆ ಮತ್ತು ಗಣನೀಯ ಅನುಷ್ಠಾನ ವೆಚ್ಚಗಳು, ಭವಿಷ್ಯದ ಅಧ್ಯಯನಗಳು ಕೃಷಿ ಡ್ರೋನ್ಗಳನ್ನು ಸಂಯೋಜಿಸುವ ತಾಂತ್ರಿಕ, ಆರ್ಥಿಕ ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯ ಕಾರ್ಯಸಾಧ್ಯತೆಯನ್ನು ಪರಿಶೀಲಿಸಬೇಕು ಮತ್ತು ಇತರ ಕತ್ತರಿಸುವುದು- ಅಂಚಿನ ತಂತ್ರಜ್ಞಾನಗಳು.
ಮಿತಿಗಳು
ನಮ್ಮ ಅಧ್ಯಯನವು ಹಲವಾರು ಮಿತಿಗಳನ್ನು ಹೊಂದಿದೆ. ಮೊದಲನೆಯದಾಗಿ, ಅಂತಿಮ ವಿಶ್ಲೇಷಣೆಗಾಗಿ ಆಯ್ಕೆಮಾಡಿದ ಪ್ರಕಟಣೆಗಳಿಂದ ಸಂಶೋಧನೆಗಳನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಕೃಷಿ ಡ್ರೋನ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ಎಲ್ಲಾ ಸಂಬಂಧಿತ ಅಧ್ಯಯನಗಳನ್ನು ಸೆರೆಹಿಡಿಯುವುದು ಸವಾಲಿನ ಸಂಗತಿಯಾಗಿದೆ, ವಿಶೇಷವಾಗಿ ಸ್ಕೋಪಸ್ ಡೇಟಾಬೇಸ್ನಲ್ಲಿ ಸೂಚ್ಯಂಕವಾಗಿಲ್ಲ. ಇದಲ್ಲದೆ, ಡೇಟಾ ಸಂಗ್ರಹಣೆ ಪ್ರಕ್ರಿಯೆಯು ಹುಡುಕಾಟ ಕೀವರ್ಡ್ಗಳ ಸೆಟ್ಟಿಂಗ್ಗೆ ಸೀಮಿತವಾಗಿದೆ, ಅದು ಒಳಗೊಳ್ಳದಿರಬಹುದು ಮತ್ತು ಅನಿರ್ದಿಷ್ಟ ಸಂಶೋಧನೆಗಳಿಗೆ ಕಾರಣವಾಗಬಹುದು. ಹೀಗಾಗಿ, ಭವಿಷ್ಯದ ಅಧ್ಯಯನಗಳು ಮಾಡಲು ಡೇಟಾ ಸಂಗ್ರಹಣೆಯ ಆಧಾರವಾಗಿರುವ ಸಮಸ್ಯೆಗೆ ಹೆಚ್ಚಿನ ಗಮನವನ್ನು ನೀಡಬೇಕಾಗಿದೆ
ಹೆಚ್ಚು ವಿಶ್ವಾಸಾರ್ಹ ತೀರ್ಮಾನಗಳು. ಮತ್ತೊಂದು ಮಿತಿಯು ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಉಲ್ಲೇಖಗಳೊಂದಿಗೆ ಹೊಸ ಪ್ರಕಟಣೆಗಳಿಗೆ ಸಂಬಂಧಿಸಿದೆ. ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯು ಹಿಂದಿನ ಪ್ರಕಟಣೆಗಳ ಕಡೆಗೆ ಪಕ್ಷಪಾತವನ್ನು ಹೊಂದಿದೆ ಏಕೆಂದರೆ ಅವುಗಳು ವರ್ಷಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ಉಲ್ಲೇಖಗಳನ್ನು ಸ್ವೀಕರಿಸುತ್ತವೆ. ಇತ್ತೀಚಿನ ಅಧ್ಯಯನಗಳು ಗಮನ ಸೆಳೆಯಲು ಮತ್ತು ಉಲ್ಲೇಖಗಳನ್ನು ಸಂಗ್ರಹಿಸಲು ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಅಗತ್ಯವಿದೆ. ಪರಿಣಾಮವಾಗಿ, ಮಾದರಿ ಬದಲಾವಣೆಯನ್ನು ತರುವ ಇತ್ತೀಚಿನ ಅಧ್ಯಯನಗಳು ಮೊದಲ ಹತ್ತು ಪ್ರಭಾವಶಾಲಿ ಕೃತಿಗಳಲ್ಲಿ ಸ್ಥಾನ ಪಡೆಯುವುದಿಲ್ಲ. ಕೃಷಿ ಡ್ರೋನ್ಗಳಂತಹ ವೇಗವಾಗಿ ಹೊರಹೊಮ್ಮುತ್ತಿರುವ ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರಗಳ ಪರೀಕ್ಷೆಯಲ್ಲಿ ಈ ಮಿತಿಯು ಪ್ರಚಲಿತವಾಗಿದೆ. ಈ ಕೆಲಸಕ್ಕಾಗಿ ಸಾಹಿತ್ಯವನ್ನು ಅಧ್ಯಯನ ಮಾಡಲು ನಾವು ಸ್ಕೋಪಸ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಿದಂತೆ, ಭವಿಷ್ಯದ ಸಂಶೋಧಕರು ವಿಭಿನ್ನವಾಗಿ ಪರಿಗಣಿಸಬಹುದು
ವೆಬ್ ಆಫ್ ಸೈನ್ಸ್ ಮತ್ತು IEEE ಎಕ್ಸ್ಪ್ಲೋರ್ನಂತಹ ಡೇಟಾಬೇಸ್ಗಳು, ದಿಗಂತವನ್ನು ವಿಸ್ತರಿಸಲು ಮತ್ತು ಸಂಶೋಧನಾ ರಚನೆಯನ್ನು ಹೆಚ್ಚಿಸಲು.
ಸಂಭಾವ್ಯ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ಅಧ್ಯಯನಗಳು ಕಾದಂಬರಿ ಒಳನೋಟಗಳನ್ನು ರಚಿಸಲು ಕಾನ್ಫರೆನ್ಸ್ ಪೇಪರ್ಗಳು, ಅಧ್ಯಾಯಗಳು ಮತ್ತು ಪುಸ್ತಕಗಳಂತಹ ಇತರ ಪ್ರಮುಖ ಜ್ಞಾನದ ಮೂಲಗಳನ್ನು ಪರಿಗಣಿಸಬಹುದು. ಕೃಷಿ ಡ್ರೋನ್ಗಳ ಕುರಿತು ಜಾಗತಿಕ ಪ್ರಕಟಣೆಗಳ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ತನಿಖೆಯ ಹೊರತಾಗಿಯೂ, ನಮ್ಮ ಸಂಶೋಧನೆಗಳು ವಿಶ್ವವಿದ್ಯಾಲಯಗಳ ಪಾಂಡಿತ್ಯಪೂರ್ಣ ಫಲಿತಾಂಶಗಳ ಹಿಂದಿನ ಕಾರಣಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲಿಲ್ಲ. ಕೃಷಿಯ ಬಗ್ಗೆ ಸಂಶೋಧನೆಗೆ ಬಂದಾಗ ಕೆಲವು ವಿಶ್ವವಿದ್ಯಾಲಯಗಳು ಇತರರಿಗಿಂತ ಏಕೆ ಹೆಚ್ಚು ಉತ್ಪಾದಕವಾಗಿವೆ ಎಂಬುದನ್ನು ಗುಣಾತ್ಮಕವಾಗಿ ವಿವರಿಸುವಲ್ಲಿ ಇದು ಸಂಶೋಧನೆಯ ಹೊಸ ಕ್ಷೇತ್ರಕ್ಕೆ ದಾರಿ ಮಾಡಿಕೊಡುತ್ತದೆ.
ಡ್ರೋನ್ಗಳು. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಭವಿಷ್ಯದ ಅಧ್ಯಯನಗಳು ಹಲವಾರು ಸಂಶೋಧಕರು ಸೂಚಿಸಿದಂತೆ ಪರಿಸರ ಮೇಲ್ವಿಚಾರಣೆ, ಬೆಳೆ ನಿರ್ವಹಣೆ ಮತ್ತು ಕಳೆ ಮ್ಯಾಪಿಂಗ್ನಂತಹ ಹಲವಾರು ವಿಧಾನಗಳಲ್ಲಿ ಕೃಷಿ ಸುಸ್ಥಿರತೆಯನ್ನು ಹೆಚ್ಚಿಸಲು ಡ್ರೋನ್ಗಳ ಸಾಮರ್ಥ್ಯದ ಒಳನೋಟಗಳನ್ನು ಒದಗಿಸಬಹುದು (ಚಾಮುವಾ & ಸಿಂಗ್, 2019; ಇಸ್ಲಾಂ ಮತ್ತು ಇತರರು., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಆಯ್ದ ಪತ್ರಿಕೆಗಳ ಕಾರಣದಿಂದ ಪಠ್ಯ ವಿಶ್ಲೇಷಣೆ ಸಾಧ್ಯವಾಗದ ಕಾರಣ, ವ್ಯವಸ್ಥಿತ ಸಾಹಿತ್ಯ ವಿಮರ್ಶೆಗಳನ್ನು ಪರಿಶೀಲಿಸುವ ಅಗತ್ಯವಿದೆ.
ಬಳಸಿದ ಸಂಶೋಧನಾ ವಿಧಾನಗಳು ಮತ್ತು ಪೂರ್ವ ಅಧ್ಯಯನಗಳಲ್ಲಿ ರೈತರ ಒಳಗೊಳ್ಳುವಿಕೆ. ಸಂಕ್ಷಿಪ್ತವಾಗಿ, ಡ್ರೋನ್ ಸಂಶೋಧನೆಯ ನಮ್ಮ ವಿಶ್ಲೇಷಣೆಯು ಈ ಜ್ಞಾನದ ದೇಹದ ಅದೃಶ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸುತ್ತದೆ. ಆದ್ದರಿಂದ ಈ ವಿಮರ್ಶೆಯು ಪ್ರಕಟಣೆಗಳ ನಡುವಿನ ಸಂಬಂಧಗಳನ್ನು ಬಹಿರಂಗಪಡಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸಂಶೋಧನಾ ಕ್ಷೇತ್ರದ ಬೌದ್ಧಿಕ ರಚನೆಯನ್ನು ಅನ್ವೇಷಿಸುತ್ತದೆ. ಇದು ಲೇಖಕರ ಕೀವರ್ಡ್ಗಳು, ಅಂಗಸಂಸ್ಥೆಗಳು ಮತ್ತು ದೇಶಗಳಂತಹ ಸಾಹಿತ್ಯದ ವಿವಿಧ ಅಂಶಗಳ ನಡುವಿನ ಸಂಪರ್ಕವನ್ನು ಸಹ ಚಿತ್ರಿಸುತ್ತದೆ.
ಸ್ಪರ್ಧಾತ್ಮಕ ಆಸಕ್ತಿಯ ಘೋಷಣೆ
ಈ ಕಾಗದದಲ್ಲಿ ವರದಿಯಾದ ಕೆಲಸದ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುವಂತಹ ಸ್ಪರ್ಧಾತ್ಮಕ ಆರ್ಥಿಕ ಆಸಕ್ತಿಗಳು ಅಥವಾ ವೈಯಕ್ತಿಕ ಸಂಬಂಧಗಳು ತಮ್ಮಲ್ಲಿಲ್ಲ ಎಂದು ಲೇಖಕರು ಘೋಷಿಸುತ್ತಾರೆ.
ಅನುಬಂಧ 1
TITLE-ABS-KEY ((ಡ್ರೋನ್* ಅಥವಾ "ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ" ಅಥವಾ uav* ಅಥವಾ "ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆ”ಅಥವಾ US ಅಥವಾ "ರಿಮೋಟ್ ಪೈಲಟ್ ವಿಮಾನ”) ಮತ್ತು (ಕೃಷಿ ಅಥವಾ ಕೃಷಿ ಅಥವಾ ಕೃಷಿ ಅಥವಾ ರೈತ))) ಮತ್ತು (ಹೊರತುಪಡಿಸಿ (ಪುಬಿಯರ್, 2022)) ಮತ್ತು (ಮಿತಿ-ಇದಕ್ಕೆ (ಭಾಷೆ, "ಇಂಗ್ಲಿಷ್")).
ಉಲ್ಲೇಖಗಳು
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. ಸಸ್ಯವರ್ಗದ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಹಗುರವಾದ UAV ಸ್ನ್ಯಾಪ್ಶಾಟ್ ಕ್ಯಾಮೆರಾಗಳೊಂದಿಗೆ 3D ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಮಾಹಿತಿಯನ್ನು ರಚಿಸುವುದು: ಇಂದ
ಗುಣಮಟ್ಟದ ಭರವಸೆಗೆ ಕ್ಯಾಮರಾ ಮಾಪನಾಂಕ ನಿರ್ಣಯ. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ ಚಿತ್ರಣದಿಂದ ಸ್ವಯಂಚಾಲಿತ ಪಕ್ಷಿ ಪತ್ತೆಗಾಗಿ ಮಾದರಿ ಗುರುತಿಸುವಿಕೆ ಅಲ್ಗಾರಿದಮ್ ಅಭಿವೃದ್ಧಿ.
ಸರ್ವೇ । ಭೂಮಿ ಮಾಹಿತಿ. ವಿಜ್ಞಾನ 65 (1), 37–45.
ಅಬ್ದುಲ್ಲಾಹಿ, ಎ., ರೆಜೆಬ್, ಕೆ., ರೆಜೆಬ್, ಎ., ಮೊಸ್ತಫಾ, ಎಂಎಂ, ಜೈಲಾನಿ, ಎಸ್., 2021. ಕೃಷಿಯಲ್ಲಿ ವೈರ್ಲೆಸ್ ಸೆನ್ಸರ್ ನೆಟ್ವರ್ಕ್ಗಳು: ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆಯಿಂದ ಒಳನೋಟಗಳು. ಸುಸ್ಥಿರತೆ 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಆಪ್ಟಿಕಲ್ ಚಿತ್ರಣದಲ್ಲಿ ನೆರಳು ಪತ್ತೆಗಾಗಿ ವಿವಿಧ ವಿಧಾನಗಳ ಮೌಲ್ಯಮಾಪನ ಮತ್ತು ಲೆಕ್ಕಾಚಾರದ ಮೇಲೆ ನೆರಳು ಪ್ರಭಾವದ ಮೌಲ್ಯಮಾಪನ NDVI, ಮತ್ತು ಬಾಷ್ಪೀಕರಣ. ನೀರಾವರಿ. ವಿಜ್ಞಾನ 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್: UAV ಆಧಾರಿತ ಸಂವೇದಕಗಳ ವಿಮರ್ಶೆ, ಡೇಟಾ ಸಂಸ್ಕರಣೆ ಮತ್ತು
ಕೃಷಿ ಮತ್ತು ಅರಣ್ಯಕ್ಕಾಗಿ ಅರ್ಜಿಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. ಸೂರ್ಯಕಾಂತಿ ಬೆಳೆಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನವನ್ನು ಬಳಸಿಕೊಂಡು ಮಲ್ಟಿ-ಟೆಂಪೊರಲ್ ಇಮೇಜಿಂಗ್. ಬಯೋಸಿಸ್ಟ್. ಇಂಜಿನ್.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. UAV ಯಿಂದ ನಿಖರವಾದ ಡಿಜಿಟಲ್ ಎಲಿವೇಶನ್ ಮಾದರಿಗಳ ಉತ್ಪಾದನೆಯು ಕಡಿಮೆ ಶೇಕಡಾವಾರು ಅತಿಕ್ರಮಿಸುವ ಚಿತ್ರಗಳನ್ನು ಪಡೆದುಕೊಂಡಿದೆ. ಇಂಟ್
ಜೆ. ರಿಮೋಟ್ ಸೆನ್ಸ್. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
ಅಲಿ, ಐ., ಗ್ರೀಫೆನೆಡರ್, ಎಫ್., ಸ್ಟಾಮೆಂಕೋವಿಕ್, ಜೆ., ನ್ಯೂಮನ್, ಎಂ., ನೊಟಾರ್ನಿಕೋಲಾ, ಸಿ., 2015. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಡೇಟಾದಿಂದ ಜೀವರಾಶಿ ಮತ್ತು ಮಣ್ಣಿನ ತೇವಾಂಶ ಮರುಪಡೆಯುವಿಕೆಗಳಿಗಾಗಿ ಯಂತ್ರ ಕಲಿಕೆಯ ವಿಧಾನಗಳ ವಿಮರ್ಶೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 7 (12), 16398–16421.
ಅಲ್ಸಾಮ್ಹಿ, ಎಸ್ಎಚ್, ಅಫ್ಘಾಹ್, ಎಫ್., ಸಹಲ್, ಆರ್., ಹವ್ಬಾನಿ, ಎ., ಅಲ್-ಕಾನೆಸ್, ಎಂಎಎ, ಲೀ, ಬಿ., ಗುಝಾನಿ, ಎಂ., B5G ನೆಟ್ವರ್ಕ್ಗಳಲ್ಲಿ UAV ಗಳನ್ನು ಬಳಸುವ ವಸ್ತುಗಳ ಗ್ರೀನ್ ಇಂಟರ್ನೆಟ್: ಅಪ್ಲಿಕೇಶನ್ಗಳ ವಿಮರ್ಶೆ
ಮತ್ತು ತಂತ್ರಗಳು. ಜಾಹೀರಾತು ತಾತ್ಕಾಲಿಕ. Netw. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. ಕುರಿ ಜಾನುವಾರು ಮಾನಿಟರಿಂಗ್ಗಾಗಿ ಡ್ರೋನ್ಗಳು. ಇನ್: 20 ನೇ IEEE ಮೆಡಿಟರೇನಿಯನ್ ಎಲೆಕ್ಟ್ರೋಟೆಕ್ನಿಕಲ್ ಕಾನ್ಫರೆನ್ಸ್. https://doi.
org/10.1109/MELECON48756.2020.9140588.
ಅಂಪಾಟ್ಜಿಡಿಸ್, ವೈ., ಪಾರ್ಟೆಲ್, ವಿ., 2019. ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಮತ್ತು ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಸಿಟ್ರಸ್ನಲ್ಲಿ UAV-ಆಧಾರಿತ ಹೈ ಥ್ರೋಪುಟ್ ಫಿನೋಟೈಪಿಂಗ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯನ್ನು ಬಳಸಿಕೊಂಡು ನಿಖರವಾದ ಕೃಷಿ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗಾಗಿ UAV- ಸಂಗ್ರಹಿಸಿದ ಡೇಟಾವನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲು, ವಿಶ್ಲೇಷಿಸಲು ಮತ್ತು ದೃಶ್ಯೀಕರಿಸಲು ಕ್ಲೌಡ್-ಆಧಾರಿತ ಅಪ್ಲಿಕೇಶನ್. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. ಕೃಷಿಯಲ್ಲಿ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಮಾಹಿತಿಯೊಂದಿಗೆ ದೊಡ್ಡ ಡೇಟಾ ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆ. IEEE ಪ್ರವೇಶ 9, 36699–36718. https://doi.org/10.1109/
ಪ್ರವೇಶ.2021.3051196.
ಅಕ್ವಿಲಾನಿ, C., ಕನ್ಫೆಸರ್, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. ವಿಮರ್ಶೆ: ಹುಲ್ಲುಗಾವಲು ಆಧಾರಿತ ಜಾನುವಾರು ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ನಿಖರವಾದ ಜಾನುವಾರು ಕೃಷಿ ತಂತ್ರಜ್ಞಾನಗಳು. ಪ್ರಾಣಿ 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
ಅರ್ಮೆಂಟಾ-ಮೆಡಿನಾ, ಡಿ., ರಾಮಿರೆಜ್-ಡೆಲ್ರಿಯಲ್, ಟಿಎ, ವಿಲ್ಲನ್ಯೂವಾ-ವಾಸ್ಕ್ವೆಜ್, ´ ಡಿ., ಮೆಜಿಯಾ-ಅಗುಯಿರ್ರೆ, ಸಿ., ಸುಧಾರಿತ ಮಾಹಿತಿ ಮತ್ತು ಸಂವಹನ ತಂತ್ರಜ್ಞಾನಗಳ ಕುರಿತು ಟ್ರೆಂಡ್ಗಳು
ಕೃಷಿ ಉತ್ಪಾದಕತೆಯನ್ನು ಸುಧಾರಿಸುವುದು: ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆ. ಕೃಷಿವಿಜ್ಞಾನ 10 (12), ಲೇಖನ 12. https://doi.org/10.3390/agronomy10121989.
ಆರ್ಮ್ಸ್ಟ್ರಾಂಗ್, ಐ., ಪಿರೋನ್-ಬ್ರುಸ್ಸೆ, ಎಮ್., ಸ್ಮಿತ್, ಎ., ಜದುದ್, ಎಮ್., 2011. ದಿ ಫ್ಲೈಯಿಂಗ್ ಗೇಟರ್: ಒಕ್ಕಾಮ್-π ನಲ್ಲಿ ವೈಮಾನಿಕ ರೊಬೊಟಿಕ್ಸ್ ಕಡೆಗೆ. ಕಮ್ಯೂನ್. ಪ್ರಕ್ರಿಯೆ ವಾಸ್ತುಶಿಲ್ಪಿ. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
ಅರೋರಾ, SD, ಚಕ್ರವರ್ತಿ, A., 2021. ಗ್ರಾಹಕ ದೂರು ವರ್ತನೆಯ ಬೌದ್ಧಿಕ ರಚನೆ (CCB) ಸಂಶೋಧನೆ: ಒಂದು ಗ್ರಂಥಮಾಪನ ವಿಶ್ಲೇಷಣೆ. J. ವ್ಯಾಪಾರ ರೆಸ್. 122, 60–74.
ಅಸ್ಲಾನ್, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
ತೆರೆದ ಮೈದಾನಗಳು ಮತ್ತು ಹಸಿರುಮನೆಗಳಲ್ಲಿ ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ UAV ಯೊಂದಿಗಿನ ಇತ್ತೀಚಿನ ಅಧ್ಯಯನಗಳ ಸಮಗ್ರ ಸಮೀಕ್ಷೆ. ಅಪ್ಲಿಕೇಶನ್ ವಿಜ್ಞಾನ 12 (3), 1047. https://doi.org/10.3390/
ಅಪ್ಲಿಕೇಶನ್ 12031047.
ಅಟ್ಕಿನ್ಸನ್, JA, ಜಾಕ್ಸನ್, RJ, ಬೆಂಟ್ಲಿ, AR, Ober, E., & Wells, DM (2018). ಫೀಲ್ಡ್ ಫಿನೋಟೈಪಿಂಗ್ ಫಾರ್ ದಿ ಫ್ಯೂಚರ್. ಆನ್ಲೈನ್ನಲ್ಲಿ ವಾರ್ಷಿಕ ಸಸ್ಯ ವಿಮರ್ಶೆಗಳು (ಪು. 719–736). ಜಾನ್
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
ಆಸ್ಟಿನ್, ಆರ್., 2010. ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಗಳು: UAVS ವಿನ್ಯಾಸ, ಅಭಿವೃದ್ಧಿ ಮತ್ತು ನಿಯೋಜನೆ. ಇನ್: ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಗಳು: UAVS ವಿನ್ಯಾಸ, ಅಭಿವೃದ್ಧಿ ಮತ್ತು
ನಿಯೋಜನೆ. ಜಾನ್ ವೈಲಿ ಮತ್ತು ಸನ್ಸ್. https://doi.org/10.1002/9780470664797.
ಅವೈಸ್, ಎಂ., ಲಿ, ಡಬ್ಲ್ಯೂ., ಚೀಮಾ, ಎಂಜೆಎಂ, ಜಮಾನ್, ಕ್ಯೂಯು, ಶಾಹೀನ್, ಎ., ಅಸ್ಲಾಂ, ಬಿ., ಝು, ಡಬ್ಲ್ಯೂ., ಅಜ್ಮಲ್, ಎಂ., ಫಹೀಮ್, ಎಂ., ಹುಸೇನ್, ಎಸ್., ನದೀಮ್, AA, Afzal, MM, Liu, C., 2022. UAV ಆಧಾರಿತ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಇನ್ ಪ್ಲಾಂಟ್ ಸ್ಟ್ರೆಸ್, ಡಿಜಿಟಲ್ ಅಗ್ರಿಕಲ್ಚರ್ ಪ್ರಾಕ್ಟೀಸ್ಗಳಿಗಾಗಿ ಹೈ-ರೆಸಲ್ಯೂಶನ್ ಥರ್ಮಲ್ ಸೆನ್ಸರ್ ಅನ್ನು ಬಳಸಿ: ಮೆಟಾ-ರಿವ್ಯೂ. ಇಂಟ್ ಜೆ. ಎನ್ವಿರಾನ್. ವಿಜ್ಞಾನ ಟೆಕ್ನೋಲ್. https://doi.
org/10.1007/s13762-021-03801-5.
ಬ್ಯಾಕೊ, ಎಂ., ಬರ್ಟನ್, ಎ., ಫೆರೊ, ಇ., ಗೆನ್ನಾರೊ, ಸಿ., ಗೊಟ್ಟಾ, ಎ., ಮ್ಯಾಟಿಯೊಲಿ, ಎಸ್., ಪಯೋನೆಸ್ಸಾ, ಎಫ್., ರುಗ್ಗೆರಿ, ಎಂ., ವಿರೋನ್, ಜಿ., ಝನೆಲ್ಲಾ, ಎ., 2018. ಸ್ಮಾರ್ಟ್ ಕೃಷಿ: ಅವಕಾಶಗಳು, ಸವಾಲುಗಳು
ಮತ್ತು ತಂತ್ರಜ್ಞಾನ ಸಕ್ರಿಯಗೊಳಿಸುವವರು. 2018 IoT ಲಂಬ ಮತ್ತು. ಕೃಷಿಯ ಮೇಲಿನ ಸಾಮಯಿಕ ಶೃಂಗಸಭೆ -ಟಸ್ಕನಿ (IOT ಟಸ್ಕನಿ) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. UAV ಚಿತ್ರಗಳಲ್ಲಿನ ಲೈನ್ ಬೆಳೆಗಳಲ್ಲಿ ಕಳೆ ಪತ್ತೆಗಾಗಿ ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡದ ಡೇಟಾ ಲೇಬಲಿಂಗ್ನೊಂದಿಗೆ ಆಳವಾದ ಕಲಿಕೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
ಬಾಲ್ಡಿ, ಎಸ್., 1998. ಉಲ್ಲೇಖಗಳ ಹಂಚಿಕೆಯಲ್ಲಿ ರೂಢಿ ಮತ್ತು ಸಾಮಾಜಿಕ ರಚನಾತ್ಮಕ ಪ್ರಕ್ರಿಯೆಗಳು: ನೆಟ್ವರ್ಕ್-ವಿಶ್ಲೇಷಣಾತ್ಮಕ ಮಾದರಿ. ಅಂ. ಸಮಾಜ. ರೆವ್. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., ಡಿಯಾಗೋ, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. ಉಷ್ಣ ಮತ್ತು ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮೂಲಕ ದ್ರಾಕ್ಷಿತೋಟದ ನೀರಿನ ಸ್ಥಿತಿ ವ್ಯತ್ಯಾಸದ ಮೌಲ್ಯಮಾಪನ
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಬಳಸುವ ಚಿತ್ರಣ ನೀರಾವರಿ. ವಿಜ್ಞಾನ 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
ಬರಾಬಸ್ಚಿ, ಡಿ., ಟೊಂಡೆಲ್ಲಿ, ಎ., ಡಿಸಿಡೆರಿಯೊ, ಎಫ್., ವೊಲಾಂಟೆ, ಎ., ವ್ಯಾಸಿನೊ, ಪಿ., ವಾಲ್`ಇ, ಜಿ., ಕ್ಯಾಟಿವೆಲ್ಲಿ, ಎಲ್., ಮುಂದಿನ ಪೀಳಿಗೆಯ ತಳಿ. ಸಸ್ಯ ವಿಜ್ಞಾನ 242, 3–13. https://doi.org/10.1016/j.
ಸಸ್ಯಗಳು.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. ಜಾನುವಾರುಗಳನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಗಳ ಬಳಕೆಯ ದೃಷ್ಟಿಕೋನಗಳು. ಔಟ್ಲುಕ್ ಅಗ್ರಿಕ್. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
ಬರೆತ್, ಜಿ., ಆಸೆನ್, ಹೆಚ್., ಬೆಂಡಿಗ್, ಜೆ., ಗ್ನೈಪ್, ಎಂಎಲ್, ಬೋಲ್ಟೆನ್, ಎ., ಜಂಗ್, ಎ., ಮೈಕೆಲ್ಸ್, ಆರ್., ಸೌಕ್ಕಮಾಕಿ, ¨ ಜೆ., 2015. ಕಡಿಮೆ ತೂಕ ಮತ್ತು UAV-ಆಧಾರಿತ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಪೂರ್ಣ-ಫ್ರೇಮ್ ಕ್ಯಾಮೆರಾಗಳು
ಬೆಳೆಗಳ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ: ಪೋರ್ಟಬಲ್ ಸ್ಪೆಕ್ಟ್ರೊರಾಡಿಯೋಮೀಟರ್ ಅಳತೆಗಳೊಂದಿಗೆ ಸ್ಪೆಕ್ಟ್ರಲ್ ಹೋಲಿಕೆ. ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ, ಫರ್ನರ್ಕುಂಡಂಗ್, ಜಿಯೋಇನ್ಫರ್ಮೇಷನ್ 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
ಬ್ಯಾರಿಯೆಂಟೊಸ್, ಎ., ಕೊಲೊರಾಡೋ, ಜೆ., ಡೆಲ್ ಸೆರ್ರೊ, ಜೆ., ಮಾರ್ಟಿನೆಜ್, ಎ., ರೊಸ್ಸಿ, ಸಿ., ಸ್ಯಾನ್ಜ್, ಡಿ., ವ್ಯಾಲೆಂಟೆ, ಜೆ., ಏರಿಯಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಇನ್ ಅಗ್ರಿಕಲ್ಚರ್: ಎ ಪ್ರಾಕ್ಟಿಕಲ್ ಅಪ್ರೋಚ್ ಟು ಏರಿಯಾ ಕವರೇಜ್
ಮತ್ತು ಮಿನಿ ಏರಿಯಲ್ ರೋಬೋಟ್ಗಳ ಫ್ಲೀಟ್ಗಳಿಗೆ ಮಾರ್ಗ ಯೋಜನೆ. J. ಫೀಲ್ಡ್ ರಾಬ್. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. ಬಹು-ರೋಟರ್ UAV ಗಳಿಗೆ ನಿಖರವಾದ ಮಾರ್ಗ-ಯೋಜನೆಯ ಅಲ್ಗಾರಿದಮ್ಗಳ ಅನ್ವಯದ ಸಮೀಕ್ಷೆ
ಕೃಷಿ. ಜೆ. ನಾವಿಗ್ 75 (2), 364–383.
Basnet, B., Bang, J., 2018. ಜ್ಞಾನ-ತೀವ್ರ ಕೃಷಿಯ ಅತ್ಯಾಧುನಿಕತೆ: ಅನ್ವಯಿಕ ಸಂವೇದನಾ ವ್ಯವಸ್ಥೆಗಳು ಮತ್ತು ಡೇಟಾ ವಿಶ್ಲೇಷಣೆಗಳ ವಿಮರ್ಶೆ. ಜೆ. ಸೆನ್ಸ್. 2018, 1–13.
ಬೆಂಡಿಗ್, ಜೆ., ಬೋಲ್ಟೆನ್, ಎ., ಬರೆತ್, ಜಿ., 2013. ಯುಎವಿ ಆಧಾರಿತ ಇಮೇಜಿಂಗ್ ಬಹು-ತಾತ್ಕಾಲಿಕ, ಅತಿ ಹೆಚ್ಚು ರೆಸಲ್ಯೂಶನ್ ಕ್ರಾಪ್ ಮೇಲ್ಮೈ ಮಾದರಿಗಳಿಗಾಗಿ ಬೆಳೆ ಬೆಳವಣಿಗೆಯ ವ್ಯತ್ಯಾಸವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು. ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ, ಫರ್ನರ್ಕುಂಡಂಗ್, ಜಿಯೋಇನ್ಫರ್ಮೇಷನ್ 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. UAV ಆಧಾರಿತ RGB ಚಿತ್ರಣದಿಂದ ಪಡೆದ ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿಗಳನ್ನು (CSMs) ಬಳಸಿಕೊಂಡು ಬಾರ್ಲಿಯ ಜೀವರಾಶಿಯನ್ನು ಅಂದಾಜು ಮಾಡುವುದು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. UAV ಆಧಾರಿತ ಸಸ್ಯ ಎತ್ತರವನ್ನು ಬೆಳೆ ಮೇಲ್ಮೈಯಿಂದ ಸಂಯೋಜಿಸುವುದು ಮಾದರಿಗಳು,
ಗೋಚರ, ಮತ್ತು ಬಾರ್ಲಿಯಲ್ಲಿ ಜೀವರಾಶಿ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಅತಿಗೆಂಪು ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕಗಳ ಬಳಿ. ಇಂಟ್ J. ಅಪ್ಲಿಕೇಶನ್ ಭೂಮಿಯ ಒಬ್ಸ್. ಜಿಯೋಇನ್ಫ್. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
ಬರ್ನಿ, ಜೆಎ, ಝಾರ್ಕೊ-ತೇಜಡಾ, ಪಿಜೆ, ಸೆಪಲ್ಕ್ರೆ-ಕಾಂಟೊ, ´ ಜಿ., ಫೆರೆರೆಸ್, ಇ., ವಿಲ್ಲಾಲೋಬೋಸ್, ಎಫ್., 2009 ಎ. ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಬಳಸಿಕೊಂಡು ಆಲಿವ್ ತೋಟಗಳಲ್ಲಿ ಮೇಲಾವರಣ ವಾಹಕತೆ ಮತ್ತು CWSI ಮ್ಯಾಪಿಂಗ್
ಥರ್ಮಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಚಿತ್ರಣ. ರಿಮೋಟ್ ಸೆನ್ಸ್. ಪರಿಸರ. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
ಬರ್ನಿ, JA, ಝಾರ್ಕೊ-ತೇಜಡಾ, PJ, ಸೌರೆಜ್, ´ L., ಫೆರೆರೆಸ್, E., 2009b. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನದಿಂದ ಸಸ್ಯವರ್ಗದ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಉಷ್ಣ ಮತ್ತು ನ್ಯಾರೋಬ್ಯಾಂಡ್ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್. IEEE ಟ್ರಾನ್ಸ್. ಜಿಯೋಸ್ಕಿ. ರಿಮೋಟ್ ಸೆನ್ಸ್. 47 (3), 722–738.
Bouzembrak, Y., Kluche, M., Gavai, A., Marvin, HJP, 2019. ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ ಇನ್ ಫುಡ್ ಸೇಫ್ಟಿ: ಲಿಟರೇಚರ್ ರಿವ್ಯೂ ಮತ್ತು ಎ ಬಿಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆ. ಟ್ರೆಂಡ್ಸ್ ಆಹಾರ ವಿಜ್ಞಾನ ಟೆಕ್ನೋಲ್. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
ಬ್ರೂಸ್ಟರ್, ಸಿ., ರೌಸಾಕಿ, ಐ., ಕಲಾಟ್ಜಿಸ್, ಎನ್., ಡೂಲಿನ್, ಕೆ., ಎಲ್ಲಿಸ್, ಕೆ., 2017. ಕೃಷಿಯಲ್ಲಿ ಐಒಟಿ: ಯುರೋಪ್-ವ್ಯಾಪಿ ದೊಡ್ಡ ಪ್ರಮಾಣದ ಪೈಲಟ್ ವಿನ್ಯಾಸ. IEEE ಕಮ್ಯೂನ್. ಮ್ಯಾಗ್. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. ಮಿಲಿಮೀಟರ್ ನಿಖರತೆಯಲ್ಲಿ ಪ್ರತ್ಯೇಕ ಮೊಳಕೆ ಮತ್ತು ಮೊಳಕೆ ಸಮುದಾಯಗಳ ಮಲ್ಟಿ-ಸೆನ್ಸರ್ UAV ಟ್ರ್ಯಾಕಿಂಗ್. ಡ್ರೋನ್ಸ್ 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. UAV ಚಿತ್ರಗಳಿಂದ ನಿಖರವಾದ ಕೃಷಿ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗಾಗಿ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಗಳು ಮತ್ತು ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವುದು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. UAV ಯಿಂದ ಪಡೆದ ವೈಡ್-ಡೈನಾಮಿಕ್-ರೇಂಜ್ ವೆಜಿಟೇಶನ್ ಇಂಡೆಕ್ಸ್ (WDRVI) ಬಳಸಿಕೊಂಡು ಸಕ್ಕರೆ ಬೀಟ್ ಬೆಳವಣಿಗೆಯ ಸೂಚಕಗಳ ಮೇಲ್ವಿಚಾರಣೆ
ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಗಳು. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
ಕ್ಯಾಸಿಲ್ಲಾಸ್, ಜೆ., ಅಸೆಡೊ, ಎಫ್., 2007. ಕೌಟುಂಬಿಕ ವ್ಯವಹಾರ ಸಾಹಿತ್ಯದ ಬೌದ್ಧಿಕ ರಚನೆಯ ವಿಕಸನ: ಎಫ್ಬಿಆರ್ನ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ಅಧ್ಯಯನ. ಫ್ಯಾಮಿಲಿ ಬಿಸಿನೆಸ್ ರೆವ್. 20 (2), 141–162.
ಸೆನ್, ಎಚ್., ವಾನ್, ಎಲ್., ಝು, ಜೆ., ಲಿ, ವೈ., ಲಿ, ಎಕ್ಸ್., ಝು, ವೈ., ವೆಂಗ್, ಎಚ್., ವು, ಡಬ್ಲ್ಯೂ., ಯಿನ್, ಡಬ್ಲ್ಯೂ., ಕ್ಸು, ಸಿ., ಬಾವೊ, ವೈ., ಫೆಂಗ್, ಎಲ್., ಶೌ, ಜೆ., ಹೆ, ವೈ., 2019. ಅಡಿಯಲ್ಲಿ ಅಕ್ಕಿಯ ಜೀವರಾಶಿಯ ಡೈನಾಮಿಕ್ ಮಾನಿಟರಿಂಗ್
ಡ್ಯುಯಲ್ ಇಮೇಜ್-ಫ್ರೇಮ್ ಸ್ನ್ಯಾಪ್ಶಾಟ್ ಕ್ಯಾಮೆರಾಗಳೊಂದಿಗೆ ಹಗುರವಾದ UAV ಬಳಸಿಕೊಂಡು ವಿಭಿನ್ನ ಸಾರಜನಕ ಚಿಕಿತ್ಸೆಗಳು. ಸಸ್ಯ ವಿಧಾನಗಳು 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
ಚಮುವಾ, ಎ., ಸಿಂಗ್, ಆರ್., 2019. ನಾಗರಿಕ UAV ಮೂಲಕ ಭಾರತೀಯ ಕೃಷಿಯಲ್ಲಿ ಸುಸ್ಥಿರತೆಯನ್ನು ಭದ್ರಪಡಿಸುವುದು: ಜವಾಬ್ದಾರಿಯುತ ನಾವೀನ್ಯತೆ ದೃಷ್ಟಿಕೋನ. SN Appl. ವಿಜ್ಞಾನ 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
ಚಮುವಾ, ಎ., ಸಿಂಗ್, ಆರ್., 2022. ಭಾರತೀಯ ಬೆಳೆ ವಿಮೆ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗಾಗಿ ನಾಗರಿಕ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ನಾವೀನ್ಯತೆಗಳ ಜವಾಬ್ದಾರಿಯುತ ಆಡಳಿತ. J. ಜವಾಬ್ದಾರಿ
ಟೆಕ್ನೋಲ್. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. ನಿಖರವಾದ ನೀರಾವರಿ ನಿರ್ವಹಣೆಗೆ ಬೆಳೆ ಮೇಲಾವರಣದ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಗೋಚರ-ಚಾನೆಲ್ ವೈಮಾನಿಕ ಚಿತ್ರಣವನ್ನು ಅನ್ವಯಿಸುವುದು. ಕೃಷಿ. ನೀರು
ಮನಗ್. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. ಆನ್-ಬೋರ್ಡ್ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ ಮತ್ತು ಸಿಂಗಲ್ ಫ್ರೀಕ್ವೆನ್ಸಿ GPS ಸ್ಥಾನದೊಂದಿಗೆ ಹಗುರವಾದ UAV ಮಾಪನಶಾಸ್ತ್ರದ ಅನ್ವಯಗಳಿಗಾಗಿ. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. ಸ್ವಾಯತ್ತ ಡ್ರೋನ್ ಕಾರ್ಯಾಚರಣೆಗಳ ನಿರ್ವಹಣೆಗಾಗಿ Blockchain-ಆಧಾರಿತ IoT ವೇದಿಕೆ. ಇನ್: 2ನೇ ACM ನ ಪ್ರೊಸೀಡಿಂಗ್ಸ್
MobiCom ಕಾರ್ಯಾಗಾರ ಡ್ರೋನ್ ಅಸಿಸ್ಟೆಡ್ ವೈರ್ಲೆಸ್ ಕಮ್ಯುನಿಕೇಶನ್ಸ್ ಫಾರ್ 5G ಮತ್ತು ಬಿಯಾಂಡ್, pp. 31–36. https://doi.org/10.1145/3414045.3415939.
ದಿನ, ಆರ್ಎ, ಗ್ಯಾಸ್ಟಲ್, ಬಿ., 1998. ವೈಜ್ಞಾನಿಕ ಪತ್ರಿಕೆಯನ್ನು ಬರೆಯುವುದು ಮತ್ತು ಪ್ರಕಟಿಸುವುದು ಹೇಗೆ. ಕೇಂಬ್ರಿಡ್ಜ್ ಯೂನಿವರ್ಸಿಟಿ ಪ್ರೆಸ್. ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ, AI, ಪೆನಾ, ˜ JM, ಟೊರೆಸ್-ಸ್ಯಾಂಚೆಜ್, ´ J., ಜಿಮೆನೆಜ್-ಬ್ರೆನೆಸ್, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. ಮ್ಯಾಪಿಂಗ್ ಸೈನೊಡಾನ್ ಡ್ಯಾಕ್ಟಿಲಾನ್ ಇನ್ಫ್ ನಿಖರವಾದ ವೈಟಿಕಲ್ಚರ್ಗಾಗಿ ಸ್ವಯಂಚಾಲಿತ ನಿರ್ಧಾರ ಮರ-OBIA ಕಾರ್ಯವಿಧಾನ ಮತ್ತು UAV ಚಿತ್ರಣದೊಂದಿಗೆ ಬೆಳೆಗಳನ್ನು ಕವರ್ ಮಾಡಿ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. ಒಂದು ಸ್ವಯಂಚಾಲಿತ ಯಾದೃಚ್ಛಿಕ ಅರಣ್ಯ-OBIA ಅಲ್ಗಾರಿದಮ್ UAV ಚಿತ್ರಣವನ್ನು ಬಳಸಿಕೊಂಡು ಕ್ರಾಪ್ ಸಾಲುಗಳ ನಡುವೆ ಮತ್ತು ಒಳಗೆ ಆರಂಭಿಕ ಕಳೆ ಮ್ಯಾಪಿಂಗ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. UAV ಚಿತ್ರಣದಿಂದ ಪಡೆದ DSM ಅನ್ನು ಬಳಸಿಕೊಂಡು ಗೋಧಿ ಜೀನೋಟೈಪ್ಗಳ ಸಸ್ಯ ಎತ್ತರದ ಸ್ವಯಂಚಾಲಿತ ಮಾಪನ. ಪ್ರಕ್ರಿಯೆಗಳು 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳನ್ನು ಬಳಸಿಕೊಂಡು ನೈಜ-ಸಮಯದ ವೀಡ್ ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ಹಗುರವಾದ ಶಬ್ದಾರ್ಥದ ಸೆಗ್ಮೆಂಟೇಶನ್ ನೆಟ್ವರ್ಕ್. ಅಪ್ಲಿಕೇಶನ್ ವಿಜ್ಞಾನ 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV-ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಫಾರ್ ನಿಖರವಾದ ಕೃಷಿ: ವಿಭಿನ್ನ ಕ್ಯಾಮೆರಾಗಳ ನಡುವಿನ ಹೋಲಿಕೆ. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. ಮಣ್ಣಿನ ಸೂಚಕಗಳನ್ನು ಅಂದಾಜು ಮಾಡಲು ಯಂತ್ರ ಕಲಿಕೆ ಮತ್ತು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ತಂತ್ರಗಳನ್ನು ಅನ್ವಯಿಸಲಾಗಿದೆ - ವಿಮರ್ಶೆ. ಇಕೋಲ್. ಇಂಡಿ. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. 3D ಫೋಟೋವನ್ನು ಬಳಸಿಕೊಂಡು ಆಲಿವ್ ಮರದ ಕಿರೀಟದ ನಿಯತಾಂಕಗಳನ್ನು ನಿರ್ಣಯಿಸಲು ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ವಾಯುಗಾಮಿ UAV ಚಿತ್ರಣ
ಪುನರ್ನಿರ್ಮಾಣ: ಸಂತಾನೋತ್ಪತ್ತಿ ಪ್ರಯೋಗಗಳಲ್ಲಿ ಅಪ್ಲಿಕೇಶನ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
ದೀಕ್ಷಿತ್, ಎ., ಜಖರ್, ಎಸ್ಕೆ, 2021. ಏರ್ಪೋರ್ಟ್ ಸಾಮರ್ಥ್ಯ ನಿರ್ವಹಣೆ: ಒಂದು ವಿಮರ್ಶೆ ಮತ್ತು ಗ್ರಂಥಮಾಪನ ವಿಶ್ಲೇಷಣೆ. ಜೆ. ಏರ್ ಟ್ರಾನ್ಸ್ಪ್ ಮನಗ್. 91, 102010.
ಡಾಂಗ್, ಟಿ., ಶಾಂಗ್, ಜೆ., ಲಿಯು, ಜೆ., ಕಿಯಾನ್, ಬಿ., ಜಿಂಗ್, ಕ್ಯೂ., ಮಾ, ಬಿ., ಹಫ್ಮನ್, ಟಿ., ಗೆಂಗ್, ಎಕ್ಸ್., ಸೌ, ಎ., ಶಿ, ವೈ., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
ಕೆನಡಾದ ಒಂಟಾರಿಯೊದಲ್ಲಿ ಬೆಳೆ ಬೆಳವಣಿಗೆ ಮತ್ತು ಇಳುವರಿಯಲ್ಲಿ ಕ್ಷೇತ್ರದೊಳಗಿನ ವ್ಯತ್ಯಾಸವನ್ನು ಗುರುತಿಸಲು RapidEye ಚಿತ್ರಣವನ್ನು ಬಳಸುವುದು. ನಿಖರವಾದ ಕೃಷಿ. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
ದತ್ತಾ, ಪಿಕೆ, ಮಿತ್ರ, ಎಸ್., 2021. ಕೋವಿಡ್-19 ನಂತರದ ಅವಧಿಯಲ್ಲಿ ಆಹಾರ ಪೂರೈಕೆ ಸರಪಳಿಯನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಕೃಷಿ ಡ್ರೋನ್ಗಳು ಮತ್ತು ಐಒಟಿಗಳ ಅಪ್ಲಿಕೇಶನ್. ಇನ್: ಚೌಧರಿ, ಎ., ಬಿಸ್ವಾಸ್, ಎ., ಪ್ರತೀಕ್, ಎಂ.,
ಚಕ್ರಬರ್ತಿ, A. (ಸಂಪಾದಕರು), ಅಗ್ರಿಕಲ್ಚರಲ್ ಇನ್ಫರ್ಮ್ಯಾಟಿಕ್ಸ್: IoT ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಆಟೋಮೇಷನ್. ವಿಲೇ, ಪುಟಗಳು 67–87. ವ್ಯಾನ್ ಎಕ್, ಎನ್., ವಾಲ್ಟ್ಮ್ಯಾನ್, ಎಲ್., 2009. ಸಾಫ್ಟ್ವೇರ್ ಸಮೀಕ್ಷೆ: ವಿಒಎಸ್ವ್ಯೂವರ್, ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ಕಂಪ್ಯೂಟರ್ ಪ್ರೋಗ್ರಾಂ. ಸೈಂಟೋಮೆಟ್ರಿಕ್ಸ್ 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindi, MN, 2018. ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ (IoT) ಮತ್ತು ಕೃಷಿಯಲ್ಲಿ ಡೇಟಾ ವಿಶ್ಲೇಷಣೆಯ ಒಂದು ಅವಲೋಕನ: ಪ್ರಯೋಜನಗಳು ಮತ್ತು ಸವಾಲುಗಳು.
IEEE ಇಂಟರ್ನೆಟ್ ಥಿಂಗ್ಸ್ J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. ಕೃಷಿಶಾಸ್ತ್ರದ ಮೌಲ್ಯೀಕರಣ UAV ಮತ್ತು ಕ್ಷೇತ್ರ
ಟೊಮೆಟೊ ಪ್ರಭೇದಗಳಿಗೆ ಅಳತೆಗಳು. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. ಹೈ ರೆಸಲ್ಯೂಶನ್ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮತ್ತು ಥರ್ಮಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಆಧಾರಿತ ನೀರಿನ ಒತ್ತಡ ಮೌಲ್ಯಮಾಪನ
ಉಪಮೇಲ್ಮೈ ನೀರಾವರಿ ದ್ರಾಕ್ಷಿಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. ಮಣ್ಣಿನ ದರ್ಜೆಗಾಗಿ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಅನ್ನು ಬಳಸುವುದು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (20), 3312. ttps://doi.org/10.3390/
Rs12203312.
ಫಾಸೆಟ್, ಡಿ., ಪಾನಿಗಡ, ಸಿ., ಟ್ಯಾಗ್ಲಿಯಾಬು, ಜಿ., ಬೊಶೆಟ್ಟಿ, ಎಂ., ಸೆಲೆಸ್ಟಿ, ಎಂ., ಎವ್ಡೋಕಿಮೊವ್, ಎ., ಬಿರಿಯುಕೋವಾ, ಕೆ., ಕೊಲಂಬೊ, ಆರ್., ಮಿಗ್ಲಿಯೆಟ್ಟಾ, ಎಫ್., ರಾಸ್ಚರ್, ಯು., ಆಂಡರ್ಸನ್, ಕೆ., 2020. ಕಾರ್ಯಾಚರಣೆಯ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಡ್ರೋನ್-ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮೇಲ್ಮೈ ಪ್ರತಿಫಲನ ಮತ್ತು ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕಗಳ ಮಲ್ಟಿಸ್ಕೇಲ್ ಮೌಲ್ಯಮಾಪನ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (3), 514.
ಫೆಂಗ್, ಎಕ್ಸ್., ಯಾನ್, ಎಫ್., ಲಿಯು, ಎಕ್ಸ್., 2019. ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ನಲ್ಲಿ ವೈರ್ಲೆಸ್ ಸಂವಹನ ತಂತ್ರಜ್ಞಾನಗಳ ಅಧ್ಯಯನ. ವೈರ್ಲೆಸ್ ಪರ್ಸ್. ಕಮ್ಯೂನ್. 108 (3),
1785-1802.
ಫೆರೀರಾ, ಎಂಪಿ, ಪಿಂಟೊ, ಸಿಎಫ್, ಸೆರ್ರಾ, ಎಫ್ಆರ್, 2014. ಅಂತರರಾಷ್ಟ್ರೀಯ ವ್ಯಾಪಾರ ಸಂಶೋಧನೆಯಲ್ಲಿ ವಹಿವಾಟು ವೆಚ್ಚಗಳ ಸಿದ್ಧಾಂತ: ಮೂರು ದಶಕಗಳಲ್ಲಿ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ಅಧ್ಯಯನ. ಸೈಂಟೊಮೆಟ್ರಿಕ್ಸ್ 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
ಫಿಶರ್, ಪಿ., ಅಬುಜರ್, ಎಂ., ರಬ್, ಎಂ., ಬೆಸ್ಟ್, ಎಫ್., ಚಂದ್ರ, ಎಸ್., 2009. ಆಗ್ನೇಯ ಆಸ್ಟ್ರೇಲಿಯಾದಲ್ಲಿ ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಪ್ರಗತಿ. I. ಅನುಕರಿಸಲು ಒಂದು ಹಿಂಜರಿತ ವಿಧಾನ
ರೈತರ ಐತಿಹಾಸಿಕ ಗದ್ದೆಯ ಇಳುವರಿ ಮತ್ತು ಸಾಮಾನ್ಯೀಕರಿಸಿದ ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕವನ್ನು ಬಳಸಿಕೊಂಡು ಏಕದಳ ಇಳುವರಿಯಲ್ಲಿ ಪ್ರಾದೇಶಿಕ ವ್ಯತ್ಯಾಸ. ಬೆಳೆ ಹುಲ್ಲುಗಾವಲು ವಿಜ್ಞಾನ 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. ವಿಜ್ಞಾನ, ತಂತ್ರಜ್ಞಾನ ಮತ್ತು ಸಣ್ಣ ಸ್ವಾಯತ್ತ ಡ್ರೋನ್ಗಳ ಭವಿಷ್ಯ. ನೇಚರ್ 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. ಸ್ಮಾರ್ಟ್ ಕೃಷಿಯ ಭವಿಷ್ಯಕ್ಕಾಗಿ ವಸ್ತುಗಳ ಇಂಟರ್ನೆಟ್: ಉದಯೋನ್ಮುಖ ತಂತ್ರಜ್ಞಾನಗಳ ಸಮಗ್ರ ಸಮೀಕ್ಷೆ. IEEE CAA J. ಆಟೋಮ್. ಸಿನಿಕಾ 8 (4), 718–752.
ಫ್ಯೂಯೆಂಟೆಸ್-ಪಚೆಕೊ, ಜೆ., ಟೊರೆಸ್-ಒಲಿವಾರೆಸ್, ಜೆ., ರೋಮನ್-ರಾಂಗೆಲ್, ಇ., ಸೆರ್ವಾಂಟೆಸ್, ಎಸ್., ಜುವಾರೆಜ್ಲೋಪೆಜ್, ಪಿ., ಹೆರ್ಮೊಸಿಲ್ಲೊ-ವಲಾಡೆಜ್, ಜೆ., ರೆಂಡನ್-ಮಂಚ, ´ ಜೆಎಂ, 2019. ಅಂಜೂರದ ಸಸ್ಯ ವಿಭಜನೆ ಆಳವಾದ ಕನ್ವಲ್ಯೂಷನಲ್ ಎನ್ಕೋಡರ್-ಡಿಕೋಡರ್ ನೆಟ್ವರ್ಕ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ವೈಮಾನಿಕ ಚಿತ್ರಗಳಿಂದ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (10), 1157. https://doi.org/10.3390/rs11101157.
ಗಾಗೋ, ಜೆ., ಡೌಥೆ, ಸಿ., ಕೂಪ್ಮ್ಯಾನ್, ಆರ್ಇ, ಗ್ಯಾಲೆಗೊ, ಪಿಪಿ, ರಿಬಾಸ್-ಕಾರ್ಬೋ, ಎಂ., ಫ್ಲೆಕ್ಸಾಸ್, ಜೆ., ಎಸ್ಕಲೋನಾ, ಜೆ., ಮೆಡ್ರಾನೊ, ಎಚ್., 2015. ನೀರಿನ ಒತ್ತಡವನ್ನು ನಿರ್ಣಯಿಸಲು UAV ಗಳ ಸವಾಲು
ಸುಸ್ಥಿರ ಕೃಷಿ. ಕೃಷಿ. ವಾಟರ್ ಮ್ಯಾನೇಗ್. 153, 9–19. https://doi.org/10.1016/j. ಆಗಸ್ಟ್.2015.01.020.
ಗಾರ್ಸಿಯಾ-ಟೆಜೆರೊ, ಐಎಫ್, ರೂಬಿಯೊ, ಎಇ, ವಿನುಯೆಲಾ, ˜ ಐ., ಹೆರ್ನ್ ಆಂಡೆಜ್, ಎ., ಗುಟಿರೆಜ್-ಗೋರ್ಡಿಲ್ಲೊ, ಎಸ್., ರೊಡ್ರಿಗಸ್-ಪ್ಲೆಗುಜುವೆಲೊ, ಸಿಆರ್, ಡುರ್ ಆನ್-ಜುವಾಜೊ, ವಿಹೆಚ್, 2018. ಥರ್ಮಲ್ ಇಮೇಜಿಂಗ್ ಸಸ್ಯದಲ್ಲಿ
ಕೊರತೆ ನೀರಾವರಿ ತಂತ್ರಗಳ ಅಡಿಯಲ್ಲಿ ಬಾದಾಮಿ ಮರಗಳಲ್ಲಿನ ಬೆಳೆ-ನೀರಿನ ಸ್ಥಿತಿಯನ್ನು ನಿರ್ಣಯಿಸಲು ಮಟ್ಟ (ಸಿವಿ. ಗೌರಾ). ಕೃಷಿ. ವಾಟರ್ ಮ್ಯಾನೇಗ್. 208, 176–186. https://doi.org/10.1016/j.
ಆಗಸ್ಟ್.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. ಸಣ್ಣ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ UAS ಅನ್ನು ಬಳಸಿಕೊಂಡು ಮೇಲ್ಮೈ ಪ್ರತಿಫಲನ ಮತ್ತು ಸನ್ಇಂಡ್ಯೂಸ್ಡ್ ಫ್ಲೋರೊಸೆನ್ಸ್ ಸ್ಪೆಕ್ಟ್ರೋಸ್ಕೋಪಿ ಮಾಪನಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovic, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. ಒಂದು ಸ್ವಯಂಚಾಲಿತ ವಿಧಾನ
UAV ಚಿತ್ರಣವನ್ನು ಆಧರಿಸಿ ಓಟ್ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಕಳೆ ಮ್ಯಾಪಿಂಗ್. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ.
ಗೆಬ್ಬರ್ಸ್, ಆರ್., ಆಡಮ್ಚುಕ್, VI, 2010. ನಿಖರವಾದ ಕೃಷಿ ಮತ್ತು ಆಹಾರ ಭದ್ರತೆ. ವಿಜ್ಞಾನ 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಯೊಂದಿಗೆ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡಿರುವ ವೈಮಾನಿಕ ಚಿತ್ರಗಳು ಮತ್ತು ಕ್ರಾಪ್ ಮೇಲ್ಮೈ ಮಾದರಿಗಳ ಆಧಾರದ ಮೇಲೆ ಕಾರ್ನ್ ಇಳುವರಿಯ ಸಂಯೋಜಿತ ಸ್ಪೆಕ್ಟ್ರಲ್ ಮತ್ತು ಪ್ರಾದೇಶಿಕ ಮಾಡೆಲಿಂಗ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. ಬಳಕೆದಾರರಿಗೆ ಸಮರ್ಥನೀಯ ವಿನ್ಯಾಸ: ಸಾಹಿತ್ಯ ವಿಮರ್ಶೆ ಮತ್ತು ಗ್ರಂಥಮಾಪನ ವಿಶ್ಲೇಷಣೆ. ಪರಿಸರ. ವಿಜ್ಞಾನ ಮಾಲಿನ್ಯ. ರೆಸ್. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಉಪಗ್ರಹ ಮತ್ತು ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಅನ್ನು ಸಂಯೋಜಿಸುವ ಮೂಲಕ ಸ್ಪೆಕ್ಟ್ರಲ್ಟೆಂಪೊರಲ್ ಪ್ರತಿಕ್ರಿಯೆ ಮೇಲ್ಮೈಗಳ ಉತ್ಪಾದನೆ
ನಿಖರವಾದ ಕೃಷಿ ಅನ್ವಯಗಳಿಗಾಗಿ UAV ಚಿತ್ರಣ. IEEE J. ಸೆಲ್. ಟಾಪ್. ಅಪ್ಲಿಕೇಶನ್ ಭೂಮಿಯ ಒಬ್ಸ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
ಗಿಲ್, SS, ಚನಾ, I., Buyya, R., 2017. IoT ಆಧಾರಿತ ಕೃಷಿ ಕ್ಲೌಡ್ ಮತ್ತು ದೊಡ್ಡ ಡೇಟಾ ಸೇವೆ: ಡಿಜಿಟಲ್ ಇಂಡಿಯಾದ ಆರಂಭ. J. ಆರ್ಗ್ ಮತ್ತು ಅಂತಿಮ ಬಳಕೆದಾರ ಕಂಪ್ಯೂಟ್. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. ಸಹ ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಅದೃಶ್ಯ ಕಾಲೇಜುಗಳ ಹುಡುಕಾಟ: ಒಂದು ಕ್ರಮಶಾಸ್ತ್ರೀಯ ಮೌಲ್ಯಮಾಪನ. ಸೈಂಟೋಮೆಟ್ರಿಕ್ಸ್ 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳಿಂದ (UAVs) ಮೆಕ್ಕೆ ಜೋಳದ ಸಸ್ಯಗಳ ಡಿಜಿಟಲ್ ಎಣಿಕೆಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. ಜಲವಾಸಿ ಕಳೆ ಕಣ್ಗಾವಲು ಮತ್ತು ರೋಟರಿ-ವಿಂಗ್ ಮಾನವರಹಿತ ವಾಯು ವಾಹನ
ನಿರ್ವಹಣೆ. ಜೆ. ಇಂಟೆಲ್. ರೊಬೊಟಿಕ್ ಸಿಸ್ಟ್: ಥಿಯರ್. ಅಪ್ಲಿಕೇಶನ್ 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, F., 2014. ಗೋಧಿಯಲ್ಲಿನ ನಿಖರವಾದ ಕೃಷಿ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಚಿತ್ರಣದಿಂದ ಮೊಸಾಯಿಕ್ಸ್ನ ನಿಖರತೆಯನ್ನು ನಿರ್ಣಯಿಸುವುದು. ನಿಖರ. ಕೃಷಿ. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labbe, S., Jolivot, A., Regnard, J.-L., 2016. UAV- ಸಂವೇದನೆಯ ಚಿತ್ರಣದಿಂದ ಮರದ ಪ್ರಮಾಣದಲ್ಲಿ ನೀರಿನ ಒತ್ತಡದ ಕ್ಷೇತ್ರ ಫಿನೋಟೈಪಿಂಗ್ : ಹೊಸ ಒಳನೋಟಗಳು
ಉಷ್ಣ ಸ್ವಾಧೀನ ಮತ್ತು ಮಾಪನಾಂಕ ನಿರ್ಣಯ. ನಿಖರ. ಕೃಷಿ. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. ಸಿಟ್ರಸ್ ತೋಟಗಳಲ್ಲಿನ ನೀರಿನ ಕೊರತೆಯ ಸೂಚಕವಾಗಿ ಬೆಳೆ ನೀರಿನ ಒತ್ತಡ ಸೂಚ್ಯಂಕವನ್ನು ಬಳಸುವ ಅನ್ವಯ ಮತ್ತು ಮಿತಿಗಳು. ಕೃಷಿ. ಫಾರ್. ಉಲ್ಕಾಶಿಲೆ. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ UAV ಥರ್ಮಲ್ ಚಿತ್ರಣವನ್ನು ಬಳಸುವುದು
ವಾಣಿಜ್ಯ ತೋಟದಲ್ಲಿ ಐದು ಹಣ್ಣಿನ ಮರಗಳ ಜಾತಿಗಳ ನೀರಿನ ಸ್ಥಿತಿಯಲ್ಲಿನ ವ್ಯತ್ಯಾಸವನ್ನು ನಿರ್ಣಯಿಸುವುದು. ನಿಖರ. ಕೃಷಿ. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
ಗೋಯಲ್, ಕೆ., ಕುಮಾರ್, ಎಸ್., 2021. ಹಣಕಾಸು ಸಾಕ್ಷರತೆ: ವ್ಯವಸ್ಥಿತ ವಿಮರ್ಶೆ ಮತ್ತು ಗ್ರಂಥಮಾಪನ ವಿಶ್ಲೇಷಣೆ. ಇಂಟ್ J. ಗ್ರಾಹಕ ಅಧ್ಯಯನಗಳು 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, ಎಂಗೆಲ್, A., Teichert, B., 2008. ಅರಣ್ಯ ಮತ್ತು ಕೃಷಿಯಲ್ಲಿ ಕಡಿಮೆ ವೆಚ್ಚದ uavs ಫೋಟೋಗ್ರಾಮೆಟ್ರಿಕ್ ಸಾಮರ್ಥ್ಯ. ಇಂಟರ್ನ್ಯಾಷನಲ್ ಆರ್ಕೈವ್ಸ್ ಆಫ್ ದಿ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಸ್ಪೇಷಿಯಲ್ ಇನ್ಫರ್ಮೇಷನ್ ಸೈನ್ಸಸ್ - ISPRS ಆರ್ಕೈವ್ಸ್ 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
ಗುವಾನ್, ಎಸ್., ಫುಕಾಮಿ, ಕೆ., ಮಟ್ಸುನಕಾ, ಎಚ್., ಒಕಾಮಿ, ಎಂ., ತನಕಾ, ಆರ್., ನಕಾನೊ, ಎಚ್., ಸಕೈ, ಟಿ., ನಕಾನೊ, ಕೆ., ಓಹ್ಡಾನ್, ಎಚ್., ತಕಹಾಶಿ, ಕೆ., 2019. ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ನ ಪರಸ್ಪರ ಸಂಬಂಧವನ್ನು ನಿರ್ಣಯಿಸುವುದು
NDVI ರಸಗೊಬ್ಬರ ಅನ್ವಯದ ಮಟ್ಟ ಮತ್ತು ಸಣ್ಣ UAV ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಅಕ್ಕಿ ಮತ್ತು ಗೋಧಿ ಬೆಳೆಗಳ ಇಳುವರಿಯೊಂದಿಗೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (2), 112.
ಗುಂಡೋಲ್ಫ್, ಕೆ., ಫಿಲ್ಸರ್, ಎಂ., 2013. ಮ್ಯಾನೇಜ್ಮೆಂಟ್ ರಿಸರ್ಚ್ ಅಂಡ್ ರಿಲಿಜನ್: ಎ ಸೈಟೇಶನ್ ಅನಾಲಿಸಿಸ್. ಜೆ. ಬಸ್. ನೀತಿಶಾಸ್ತ್ರ 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD ಸಿಮ್ಯುಲೇಶನ್ ಮತ್ತು ಪ್ರಾದೇಶಿಕ ಪರಿಶೀಲನೆ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ವಿತರಣೆಗಳು
ಹೂವರ್ನಲ್ಲಿರುವ ಕ್ವಾಡ್-ರೋಟರ್ ಕೃಷಿ UAV ಯ ಡೌನ್ವಾಶ್ ಗಾಳಿಯ ಹರಿವು. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
ಹಘಿಘಟ್ಟಲಾಬ್, ಎ., ಗೊನ್ಝ್ ಅಲೆಜ್ ಪೆರೆಜ್, ಎಲ್., ಮೊಂಡಲ್, ಎಸ್., ಸಿಂಗ್, ಡಿ., ಸ್ಕಿನ್ಸ್ಟಾಕ್, ಡಿ., ರುಟ್ಕೊಸ್ಕಿ, ಜೆ., ಒರ್ಟಿಜ್-ಮೊನಾಸ್ಟೆರಿಯೊ, ಐ., ಸಿಂಗ್, ಆರ್ಪಿ, ಗುಡಿನ್, ಡಿ. , ಪೋಲೆಂಡ್, ಜೆ., 2016.
ದೊಡ್ಡ ಗೋಧಿ ತಳಿ ನರ್ಸರಿಗಳ ಹೆಚ್ಚಿನ ಥ್ರೋಪುಟ್ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಗಳ ಅಪ್ಲಿಕೇಶನ್. ಸಸ್ಯ ವಿಧಾನಗಳು 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. UAV ಗಳಿಂದ ವಿವಿಧ ಬೆಳಕಿನ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ . GG ಬಿಲ್ R. (Ed.), ಇಂಟರ್ನ್ಯಾಷನಲ್ ಆರ್ಕೈವ್ಸ್ ಆಫ್ ದಿ ಫೋಟೊಗ್ರಾಮೆಟ್ರಿ, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಸ್ಪೇಷಿಯಲ್ ಇನ್ಫರ್ಮೇಷನ್ ಸೈನ್ಸಸ್-ISPRS ಆರ್ಕೈವ್ಸ್ (ಸಂಪುಟ. 40, ಸಂಚಿಕೆ 1W2, ಪುಟಗಳು. 189-194). ಇಂಟರ್ನ್ಯಾಷನಲ್ ಸೊಸೈಟಿ ಫಾರ್ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ ಮತ್ತು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
ಹ್ಯಾಮಿಲ್ಟನ್, SM, ಮೋರಿಸ್, RH, ಕರ್ವಾಲೋ, RC, ರೋಡರ್, N., ಬಾರ್ಲೋ, P., ಮಿಲ್ಸ್, K., ವಾಂಗ್, L. ಮಾನವರಹಿತ ವೈಮಾನಿಕದಿಂದ ದ್ವೀಪದ ಸಸ್ಯವರ್ಗವನ್ನು ಮ್ಯಾಪಿಂಗ್ ಮಾಡುವ ತಂತ್ರಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವುದು
ವಾಹನ (UAV) ಚಿತ್ರಗಳು: ಪಿಕ್ಸೆಲ್ ವರ್ಗೀಕರಣ, ದೃಶ್ಯ ವ್ಯಾಖ್ಯಾನ ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆಯ ವಿಧಾನಗಳು. ಇಂಟ್ J. ಅಪ್ಲಿಕೇಶನ್ ಭೂಮಿಯ ಒಬ್ಸ್. ಜಿಯೋಇನ್ಫ್. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. ಬಾಂಗ್ಲಾದೇಶದಲ್ಲಿ ಜವಾಬ್ದಾರಿಯುತ ನಾಯಕತ್ವದ ಮೂಲಕ ಸ್ಮಾರ್ಟ್ ಕೃಷಿ: ಸಾಧ್ಯತೆಗಳು, ಅವಕಾಶಗಳು ಮತ್ತು ಮೀರಿ.
ಸುಸ್ಥಿರತೆ 13 (8), 4511.
ಹಾರ್ಡಿನ್, ಪಿಜೆ, ಹಾರ್ಡಿನ್, ಟಿಜೆ, 2010. ಪರಿಸರ ಸಂಶೋಧನೆಯಲ್ಲಿ ಸಣ್ಣ-ಪ್ರಮಾಣದ ರಿಮೋಟ್ ಪೈಲಟ್ ವಾಹನಗಳು. ಭೂಗೋಳ ದಿಕ್ಸೂಚಿ 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x
Hardin, PJ, Jensen, RR, 2011. ಪರಿಸರದ ದೂರ ಸಂವೇದಿಯಲ್ಲಿ ಸಣ್ಣ ಪ್ರಮಾಣದ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು: ಸವಾಲುಗಳು ಮತ್ತು ಅವಕಾಶಗಳು. GISci. ರಿಮೋಟ್ ಸೆನ್ಸ್. 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. ಅಗ್ರಿಕಲ್ಚರಲ್ ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್: ತಂತ್ರಜ್ಞಾನಗಳು ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳು, (1ನೇ ಆವೃತ್ತಿ. 2021 ಆವೃತ್ತಿ). ಸ್ಪ್ರಿಂಗರ್.
ಹರ್ವಿಟ್ಜ್, ಎಸ್ಆರ್, ಜಾನ್ಸನ್, ಎಲ್ಎಫ್, ಡುನಾಗನ್, ಎಸ್ಇ, ಹಿಗ್ಗಿನ್ಸ್, ಆರ್ಜಿ, ಸುಲ್ಲಿವನ್, ಡಿವಿ, ಜೆಂಗ್, ಜೆ., ಲೋಬಿಟ್ಜ್, ಬಿಎಂ, ಲೆಯುಂಗ್, ಜೆಜಿ, ಗಾಲ್ಮೇಯರ್, ಬಿಎ, ಅಯೊಯಾಗಿ, ಎಂ., ಸ್ಲೈ, ಆರ್ಇ, ಬ್ರಾಸ್, ಜೆಎ, 2004.
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನದಿಂದ ಚಿತ್ರಣ: ಕೃಷಿ ಕಣ್ಗಾವಲು ಮತ್ತು ನಿರ್ಧಾರ ಬೆಂಬಲ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, UAV ಆಧಾರಿತ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಫೀಲ್ಡ್ ಪ್ಲಾಟ್ ಟ್ರಯಲ್ಸ್ನಲ್ಲಿ ಗೋಧಿ ಸಸ್ಯದ ಎತ್ತರ ಮತ್ತು ಬೆಳವಣಿಗೆಯ ದರದ ಹೈ ಥ್ರೋಪುಟ್ ಫೀಲ್ಡ್ ಫಿನೋಟೈಪಿಂಗ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨kynen, J., Pesonen, L., 2013. ಪ್ರಕ್ರಿಯೆ ಮತ್ತು ಮೌಲ್ಯಮಾಪನ ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಹಗುರವಾದ UAV ಸ್ಪೆಕ್ಟ್ರಲ್ ಕ್ಯಾಮೆರಾವನ್ನು ಬಳಸಿಕೊಂಡು ಸಂಗ್ರಹಿಸಲಾದ ಸ್ಪೆಕ್ಟ್ರೋಮೆಟ್ರಿಕ್, ಸ್ಟೀರಿಯೋಸ್ಕೋಪಿಕ್ ಚಿತ್ರಣ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. ಕಡಿಮೆ-ಎತ್ತರದ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು ಆಧಾರಿತ ವಸ್ತುಗಳ ಸೇವೆಗಳು: ಸಮಗ್ರ ಸಮೀಕ್ಷೆ ಮತ್ತು ಭವಿಷ್ಯದ ದೃಷ್ಟಿಕೋನಗಳು. IEEE ಇಂಟರ್ನೆಟ್ ಥಿಂಗ್ಸ್ J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. UAV ಗಾಗಿ ನಗರ ಕಣಿವೆಗಳ ಸಂಯೋಜಿತ ಆಪ್ಟಿಕ್-ಫ್ಲೋ ಮತ್ತು ಸ್ಟೀರಿಯೋ-ಆಧಾರಿತ ಸಂಚರಣೆ. ಇನ್: 2005 IEEE/RSJ
ಇಂಟರ್ನ್ಯಾಷನಲ್ ಕಾನ್ಫರೆನ್ಸ್ ಆನ್ ಇಂಟೆಲಿಜೆಂಟ್ ರೋಬೋಟ್ಸ್ ಅಂಡ್ ಸಿಸ್ಟಮ್ಸ್, ಪುಟಗಳು 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. ಕ್ಲೌಡ್ ಫಾಗ್ ಕಂಪ್ಯೂಟಿಂಗ್ಗಾಗಿ ಸೃಜನಾತ್ಮಕ IoT ಕೃಷಿ ವೇದಿಕೆ. ಉಳಿಸಿಕೊಳ್ಳಲು. ಕಂಪ್ಯೂಟ್. Inf. ಸಿಸ್ಟ್. 28, 100285.
ಹುವಾಂಗ್, ಹೆಚ್., ಡೆಂಗ್, ಜೆ., ಲ್ಯಾನ್, ವೈ., ಯಾಂಗ್, ಎ., ಡೆಂಗ್, ಎಕ್ಸ್., ಝಾಂಗ್, ಎಲ್., ಗೊನ್ಜಾಲೆಜ್-ಅಂಡುಜಾರ್, ಜೆಎಲ್, 2018. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನದ ಕಳೆ ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ಸಂಪೂರ್ಣ ಪರಿವರ್ತನೆಯ ಜಾಲ ( UAV) ಚಿತ್ರಣ. PLoS ONE 13 (4), e0196302.
ಹುವಾಂಗ್, ಎಚ್., ಲ್ಯಾನ್, ವೈ., ಯಾಂಗ್, ಎ., ಝಾಂಗ್, ವೈ., ವೆನ್, ಎಸ್., ಡೆಂಗ್, ಜೆ., 2020. UAV ಚಿತ್ರಣದ ವೀಡ್ ಮ್ಯಾಪಿಂಗ್ನಲ್ಲಿ ಆಬ್ಜೆಕ್ಟ್-ಆಧಾರಿತ ಇಮೇಜ್ ಅನಾಲಿಸಿಸ್ (OBIA) ವಿರುದ್ಧ ಆಳವಾದ ಕಲಿಕೆ. ಇಂಟ್ ಜೆ.
ರಿಮೋಟ್ ಸೆನ್ಸ್. 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
ಹುವಾಂಗ್, ಎಚ್., ಯಾಂಗ್, ಎ., ಟ್ಯಾಂಗ್, ವೈ., ಜುವಾಂಗ್, ಜೆ., ಹೌ, ಸಿ., ಟ್ಯಾನ್, ಝಡ್., ದನಂಜಯನ್, ಎಸ್., ಹೆ, ವೈ., ಗುವೊ, ಕ್ಯೂ., ಲುವೋ, ಎಸ್., 2021. ಕ್ರಾಪ್ ಮಾನಿಟರಿಂಗ್ನಲ್ಲಿ UAV ಚಿತ್ರಣಕ್ಕಾಗಿ ಆಳವಾದ ಬಣ್ಣದ ಮಾಪನಾಂಕ ನಿರ್ಣಯ
ಸ್ಥಳೀಯವಾಗಿ ಜಾಗತಿಕ ಗಮನಕ್ಕೆ ಲಾಕ್ಷಣಿಕ ಶೈಲಿಯ ವರ್ಗಾವಣೆಯನ್ನು ಬಳಸುವುದು. ಇಂಟ್ J. ಅಪ್ಲಿಕೇಶನ್ ಭೂಮಿಯ ಒಬ್ಸ್. ಜಿಯೋಇನ್ಫ್. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
ಹುವಾಂಗ್, YB, ಥಾಮ್ಸನ್, SJ, ಹಾಫ್ಮನ್, WC, ಲ್ಯಾನ್, YB, ಫ್ರಿಟ್ಜ್, BK, 2013. ಕೃಷಿ ಉತ್ಪಾದನೆಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ ತಂತ್ರಜ್ಞಾನಗಳ ಅಭಿವೃದ್ಧಿ ಮತ್ತು ನಿರೀಕ್ಷೆ
ನಿರ್ವಹಣೆ. ಇಂಟ್ ಜೆ. ಅಗ್ರಿಕ್ ಬಯೋಲ್. ಇಂಜಿನ್. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
ಹುವಾಂಗ್, ವೈ., ಹಾಫ್ಮನ್, ಡಬ್ಲ್ಯೂಸಿ, ಲ್ಯಾನ್, ವೈ., ವು, ಡಬ್ಲ್ಯೂ., ಫ್ರಿಟ್ಜ್, ಬಿಕೆ, 2009. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ ವೇದಿಕೆಗಾಗಿ ಸ್ಪ್ರೇ ಸಿಸ್ಟಮ್ನ ಅಭಿವೃದ್ಧಿ. ಅಪ್ಲಿಕೇಶನ್ ಇಂಜಿನ್. ಕೃಷಿ. 25 (6), 803–809.
ಹಂಟ್ ಜೂನಿಯರ್, ಇಆರ್, ಡೀನ್ ಹೈವ್ಲಿ, ಡಬ್ಲ್ಯೂ., ಫ್ಯೂಜಿಕಾವಾ, ಎಸ್ಜೆ, ಲಿಂಡೆನ್, ಡಿಎಸ್, ಡಾಟ್ರಿ, ಸಿಎಸ್ಟಿ, ಮೆಕ್ಕಾರ್ಟಿ, ಜಿಡಬ್ಲ್ಯೂ, 2010. ಎನ್ಐಆರ್-ಗ್ರೀನ್-ಬ್ಲೂ ಡಿಜಿಟಲ್ ಛಾಯಾಚಿತ್ರಗಳ ಸ್ವಾಧೀನ
ಬೆಳೆ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಮಾನವರಹಿತ ವಿಮಾನ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. ಸ್ಮಾರ್ಟ್ ಕೃಷಿಗಾಗಿ ಬೆಳೆಗಳು ಮತ್ತು ಮಣ್ಣುಗಳ ಉಪಗ್ರಹ- ಮತ್ತು ಡ್ರೋನ್ ಆಧಾರಿತ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್-ಒಂದು ವಿಮರ್ಶೆ. ಮಣ್ಣಿನ ವಿಜ್ಞಾನ. ಸಸ್ಯ ಪೌಷ್ಠಿಕಾಂಶ. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
ಇಸ್ಲಾಂ, ಎನ್., ರಶೀದ್, ಎಂಎಂ, ಪಸಂದಿಡೆ, ಎಫ್., ರೇ, ಬಿ., ಮೂರ್, ಎಸ್., ಕಡೆಲ್, ಆರ್., 2021. ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ (ಐಒಟಿ) ಗಾಗಿ ಅಪ್ಲಿಕೇಶನ್ಗಳು ಮತ್ತು ಸಂವಹನ ತಂತ್ರಜ್ಞಾನಗಳ ವಿಮರ್ಶೆ ಮತ್ತು
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಆಧಾರಿತ ಸಮರ್ಥನೀಯ ಸ್ಮಾರ್ಟ್ ಕೃಷಿ. ಸುಸ್ಥಿರತೆ 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. ಕಂಪ್ಯೂಟೆಡ್ ಹೈ ರೆಸಲ್ಯೂಶನ್ ಡಿಜಿಟಲ್ ಮೇಲ್ಮೈ ಮಾದರಿಗಳ ನಿಖರತೆಯನ್ನು ನಿರ್ಣಯಿಸುವುದು
ಉಪ-ಉತ್ತಮ ಸಮೀಕ್ಷೆ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಫೋಟೋಸ್ಕ್ಯಾನ್ ಮತ್ತು ಮಿಕ್ಮ್ಯಾಕ್. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 8 (6), https://doi.org/10.3390/rs8060465.
ಜಿಮೆನೆಜ್-ಬ್ರೆನೆಸ್, ಎಫ್ಎಂ, ಲೋಪೆಜ್-ಗ್ರಾನಾಡೋಸ್, ಎಫ್., ಕ್ಯಾಸ್ಟ್ರೋ, ಎಐ, ಟೊರೆಸ್-ಎಸ್ ಆಂಚೆಜ್, ಜೆ., ಸೆರಾನೊ, ಎನ್., ಪೆನಾ, ˜ ಜೆಎಂ, 2017. ಆಲಿವ್ ಟ್ರೀ ಆರ್ಕಿಟೆಕ್ಚರ್ ಮತ್ತು ವಾರ್ಷಿಕ ಸಮರುವಿಕೆಯ ಪರಿಣಾಮಗಳನ್ನು ಪ್ರಮಾಣೀಕರಿಸುವುದು UAV ಆಧಾರಿತ 3D ಮಾಡೆಲಿಂಗ್ ಬಳಸಿಕೊಂಡು ಮೇಲಾವರಣ ಬೆಳವಣಿಗೆ. ಸಸ್ಯ ವಿಧಾನಗಳು 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
ಜಿನ್, ಎಕ್ಸ್., ಲಿಯು, ಎಸ್., ಬ್ಯಾರೆಟ್, ಎಫ್., ಹೆಮರ್ಲೆ, ಎಂ., ಕೋಮರ್, ಎ., 2017. ಅತ್ಯಂತ ಕಡಿಮೆ ಎತ್ತರದ UAV ಚಿತ್ರಣದಿಂದ ಹೊರಹೊಮ್ಮುವ ಗೋಧಿ ಬೆಳೆಗಳ ಸಸ್ಯ ಸಾಂದ್ರತೆಯ ಅಂದಾಜುಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸ್.
ಪರಿಸರ. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
ಜಿನ್ಬೋ, ಸಿ., ಕ್ಸಿಯಾಂಗ್ಲಿಯಾಂಗ್, ಸಿ., ಹ್ಯಾನ್-ಚಿ, ಎಫ್., ಲ್ಯಾಮ್, ಎ., 2019. ಕ್ಲೌಡ್ ಕಂಪ್ಯೂಟಿಂಗ್ನಿಂದ ಬೆಂಬಲಿತ ಕೃಷಿ ಉತ್ಪನ್ನ ಮೇಲ್ವಿಚಾರಣಾ ವ್ಯವಸ್ಥೆ. ಕ್ಲಸ್ಟರ್ ಕಂಪ್ಯೂಟ್. 22 (4), 8929–8938.
ಜು, ಸಿ., & ಸನ್, HI 2018a. ಕೃಷಿಯಲ್ಲಿ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ಗಾಗಿ ಬಹು UAV ವ್ಯವಸ್ಥೆಗಳ ಕಾರ್ಯಕ್ಷಮತೆಯ ಮೌಲ್ಯಮಾಪನ. IEEE ಇಂಟರ್ನ್ಯಾಷನಲ್ ಕಾನ್ಫರೆನ್ಸ್ ಆನ್ ರೋಬೋಟಿಕ್ಸ್ ಮತ್ತು ಆಟೊಮೇಷನ್ (ICRA), ಬ್ರಿಸ್ಬೇನ್, ಆಸ್ಟ್ರೇಲಿಯಾ, 21-26 ನಲ್ಲಿ ರೋಬೋಟಿಕ್ ವಿಷನ್ ಮತ್ತು ಆಕ್ಷನ್ ಇನ್ ಅಗ್ರಿಕಲ್ಚರ್ ಕುರಿತ ಕಾರ್ಯಾಗಾರದ ಪ್ರಕ್ರಿಯೆಗಳು.
ಜು, ಸಿ., ಸನ್, HI, 2018b. ಕೃಷಿ ಅನ್ವಯಗಳಿಗೆ ಬಹು UAV ವ್ಯವಸ್ಥೆಗಳು: ನಿಯಂತ್ರಣ, ಅನುಷ್ಠಾನ ಮತ್ತು ಮೌಲ್ಯಮಾಪನ. ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ 7 (9), 162. https://doi.org/10.3390/
ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ 7090162.
ಜಂಗ್, ಜೆ., ಮೇಡಾ, ಎಂ., ಚಾಂಗ್, ಎ., ಭಂಡಾರಿ, ಎಂ., ಆಶಾಪುರೆ, ಎ., ಲ್ಯಾಂಡಿವರ್-ಬೌಲ್ಸ್, ಜೆ., 2021. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯನ್ನು ಸುಧಾರಿಸಲು ಸಾಧನಗಳ ಸಾಮರ್ಥ್ಯ
ಕೃಷಿ ಉತ್ಪಾದನಾ ವ್ಯವಸ್ಥೆಗಳ ಸ್ಥಿತಿಸ್ಥಾಪಕತ್ವ. ಕರ್ರ್. ಅಭಿಪ್ರಾಯ. ಜೈವಿಕ ತಂತ್ರಜ್ಞಾನ. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
ಕಲಿಶುಕ್, ಎಂ., ಪ್ಯಾರೆಟ್, ಎಂಎಲ್, ಫ್ರೀಮನ್, ಜೆಹೆಚ್, ರಾಜ್, ಡಿ., ಡಾ ಸಿಲ್ವಾ, ಎಸ್., ಯುಬ್ಯಾಂಕ್ಸ್, ಎಸ್., ವಿಗ್ಗಿನ್ಸ್, ಡಿಜೆ, ಲೊಲ್ಲರ್, ಎಂ., ಮಾರೋಯಿಸ್, ಜೆಜೆ, ಮೆಲ್ಲಿಂಗರ್, ಎಚ್ಸಿ, ದಾಸ್, ಜೆ. , 2019. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ-ಸಹಾಯದ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಕ್ರಾಪ್ ಇಮೇಜಿಂಗ್ ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಸುಧಾರಿತ ಕ್ರಾಪ್ ಸ್ಕೌಟಿಂಗ್ ತಂತ್ರವು ಕಲ್ಲಂಗಡಿಯಲ್ಲಿನ ಅಂಟಂಟಾದ ಕಾಂಡದ ರೋಗಕ್ಕೆ ಸಾಂಪ್ರದಾಯಿಕ ಸ್ಕೌಟಿಂಗ್ ಅಭ್ಯಾಸಕ್ಕೆ. ಸಸ್ಯ ಡಿಸ್. 103 (7), 1642–1650.
ಕಪೂರ್, ಕೆಕೆ, ತಮಿಳ್ಮಣಿ, ಕೆ., ರಾಣಾ, ಎನ್ಪಿ, ಪಾಟೀಲ್, ಪಿ., ದ್ವಿವೇದಿ, ವೈಕೆ, ನೆರೂರ್, ಎಸ್., 2018. ಸಾಮಾಜಿಕ ಮಾಧ್ಯಮ ಸಂಶೋಧನೆಯಲ್ಲಿನ ಪ್ರಗತಿ: ಭೂತ, ವರ್ತಮಾನ ಮತ್ತು ಭವಿಷ್ಯ. ತಿಳಿಸು. ಸಿಸ್ಟ್. ಮುಂಭಾಗ. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಗಳು ಮತ್ತು ಆಳದ ನಕ್ಷೆಯ ಆಧಾರದ ಮೇಲೆ ವೈನ್ ರೋಗ ಪತ್ತೆ ಜಾಲ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (20), 3305. https://doi. org/10.3390/rs12203305.
ಖಾಲಿಕ್, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. ದ್ರಾಕ್ಷಿತೋಟಕ್ಕಾಗಿ ಉಪಗ್ರಹ ಮತ್ತು UAV ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಣದ ಹೋಲಿಕೆ
ವ್ಯತ್ಯಾಸದ ಮೌಲ್ಯಮಾಪನ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain ಸುಧಾರಿತ ಆಳವಾದ ಕಲಿಕೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಆಹಾರ ಉದ್ಯಮ 4.0 ಗಾಗಿ ಆಪ್ಟಿಮೈಸ್ಡ್ ಪ್ರೊವೆನೆನ್ಸ್ ಸಿಸ್ಟಮ್ ಅನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಿದೆ. ಸಂವೇದಕಗಳು 20 (10), 2990.
ಖಾನ್, RU, ಖಾನ್, K., Albattah, W., Qamar, AM, Ullah, F., 2021. ಸಸ್ಯ ರೋಗಗಳ ಚಿತ್ರ ಆಧಾರಿತ ಪತ್ತೆ: ಶಾಸ್ತ್ರೀಯ ಯಂತ್ರ ಕಲಿಕೆಯಿಂದ ಆಳವಾದ ಕಲಿಕೆಯ ಪ್ರಯಾಣದವರೆಗೆ. ವೈರ್ಲೆಸ್ ಕಮ್ಯೂನ್. ಮೊಬೈಲ್ ಕಂಪ್ಯೂಟ್. 2021, 1–13.
ಖಾನ್, ಎಸ್., ತುಫೈಲ್, ಎಂ., ಖಾನ್, ಎಂಟಿ, ಖಾನ್, ಝಡ್ಎ, ಇಕ್ಬಾಲ್, ಜೆ., ಆಲಂ, ಎಂ., ಲೆ, ಕೆಎನ್ಕ್ಯೂ, 2021. ಯುಎವಿ ಆಧಾರಿತ ಬೆಳೆ/ಕಳೆ ವರ್ಗೀಕರಣಕ್ಕಾಗಿ ಒಂದು ಕಾದಂಬರಿ ಅರೆ-ಮೇಲ್ವಿಚಾರಣೆಯ ಚೌಕಟ್ಟು. PLoS ONE 16 (5), e0251008.
ಖನಾಲ್, ಎಸ್., ಫುಲ್ಟನ್, ಜೆ., ಶಿಯರೆರ್, ಎಸ್., 2017. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಥರ್ಮಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನ ಪ್ರಸ್ತುತ ಮತ್ತು ಸಂಭಾವ್ಯ ಅನ್ವಯಗಳ ಅವಲೋಕನ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್.
ಕೃಷಿ. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
ಖನ್ನಾ, ಎ., ಕೌರ್, ಎಸ್., 2019. ಎವಲ್ಯೂಷನ್ ಆಫ್ ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ (IoT) ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿ ಕ್ಷೇತ್ರದಲ್ಲಿ ಅದರ ಮಹತ್ವದ ಪ್ರಭಾವ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 157, 218–231.
ಕಿಮ್, ಡಬ್ಲ್ಯೂ., ಖಾನ್, ಜಿಎಫ್, ವುಡ್, ಜೆ., ಮಹ್ಮೂದ್, ಎಂಟಿ, 2016. ಸುಸ್ಥಿರ ಸಂಸ್ಥೆಗಳಿಗೆ ಉದ್ಯೋಗಿ ನಿಶ್ಚಿತಾರ್ಥ: ಸಾಮಾಜಿಕ ನೆಟ್ವರ್ಕ್ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಸ್ಫೋಟವನ್ನು ಬಳಸಿಕೊಂಡು ಕೀವರ್ಡ್ ವಿಶ್ಲೇಷಣೆ
ಪತ್ತೆ ವಿಧಾನ. ಸುಸ್ಥಿರತೆ 8 (7), 631.
ಕಿರ್ಷ್, ಎಂ., ಲೊರೆನ್ಜ್, ಎಸ್., ಝಿಮ್ಮರ್ಮ್ಯಾನ್, ಆರ್., ತುಸಾ, ಎಲ್., ಮೊಕೆಲ್, ¨ ಆರ್., ಹೊಡ್ಲ್, ¨ ಪಿ., ಬೂಯ್ಸೆನ್, ಆರ್., ಖೋಡಾಡಾಡ್ಜಾಡೆ, ಎಂ., ಗ್ಲೋಗುನ್, ಆರ್., 2018. ಏಕೀಕರಣ ಭೂಮಂಡಲದ ಮತ್ತು ಡ್ರೋನ್-ಹರಡುವ
ಎಕ್ಸ್ಪ್ಲೋರೇಶನ್ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಮೈನಿಂಗ್ ಮಾನಿಟರಿಂಗ್ಗಾಗಿ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಮತ್ತು ಫೋಟೋಗ್ರಾಮೆಟ್ರಿಕ್ ಸೆನ್ಸಿಂಗ್ ವಿಧಾನಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (9), 1366. https://doi.org/10.3390/
Rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. ಆಳವಾದ ಕಲಿಕೆ ಮತ್ತು UAV ಚಿತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಕಾರ್ನ್ ಸಸ್ಯ ಎಣಿಕೆ. IEEE ಜಿಯೋಸ್ಕಿ. ರಿಮೋಟ್ ಸೆನ್ಸ್ ಲೆಟ್. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. ಹೈಥ್ರೂಪುಟ್ ಇಮೇಜ್-ಆಧಾರಿತ ಸಸ್ಯ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ ಸ್ವಯಂಚಾಲಿತ ಯಂತ್ರ ಕಲಿಕೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 13 (5), 858. https://
doi.org/10.3390/rs13050858.
ಕೊವಾಲೆವ್, IV, ವೊರೊಶಿಲೋವಾ, AA, 2020. ಸರಕು UAV ಗಳ ಪರಿಸರ ವ್ಯವಸ್ಥೆಯ ಅಭಿವೃದ್ಧಿಯಲ್ಲಿ ಆಧುನಿಕ ತಾಂತ್ರಿಕ ಪ್ರವೃತ್ತಿಗಳು. ಜೆ. ಭೌತಶಾಸ್ತ್ರ ಕಾನ್ಫರೆನ್ಸ್ ಸೆರ್. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. ಮಾನೋಕ್ಯುಲರ್ ಕ್ಯಾಮೆರಾದೊಂದಿಗೆ ಸಣ್ಣ ಡ್ರೋನ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಒಳಾಂಗಣ ಜಾನುವಾರು ಮತ್ತು ಕೃಷಿಗಾಗಿ ವಿಷುಯಲ್ SLAM: ಒಂದು ಕಾರ್ಯಸಾಧ್ಯತೆಯ ಅಧ್ಯಯನ.
ಡ್ರೋನ್ಸ್ 5 (2), 41. https://doi.org/10.3390/drones5020041.
ಕುಲ್ಬಕಿ, ಎಂ., ಸೆಗೆನ್, ಜೆ., ನೈಕ್, ಡಬ್ಲ್ಯೂ., ಕ್ಲೆಂಪಸ್, ಆರ್., ಕ್ಲುವಕ್, ಕೆ., ನಿಕೋಡೆಮ್, ಜೆ., ಕುಲ್ಬಕಾ, ಜೆ., ಸೆರೆಸ್ಟರ್, ಎ., 2018. ಕೃಷಿ ಯಾಂತ್ರೀಕರಣಕ್ಕಾಗಿ ಡ್ರೋನ್ಗಳ ಸಮೀಕ್ಷೆ ನೆಡುವಿಕೆಯಿಂದ
ಕೊಯ್ಲು. ಇನ್: INES 2018 - IEEE 22 ನೇ ಇಂಟರ್ನ್ಯಾಷನಲ್ ಕಾನ್ಫರೆನ್ಸ್ ಆನ್ ಇಂಟೆಲಿಜೆಂಟ್ ಇಂಜಿನಿಯರಿಂಗ್ ಸಿಸ್ಟಮ್ಸ್, pp. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT ಫ್ರೇಮ್ವರ್ಕ್ ವೀಕ್ಷಣೆಗಳು ಮತ್ತು ಸವಾಲುಗಳು: ಡ್ರೋನ್ಗಳನ್ನು "ಥಿಂಗ್ಸ್" ಎಂದು ರಕ್ಷಿಸುವ ಕಡೆಗೆ. ಸಂವೇದಕಗಳು 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. ಶುಷ್ಕತೆಯ ಮೇಲೆ ಮಾನವರಹಿತ ವಿಮಾನದೊಂದಿಗೆ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡಿರುವ ಉಪ-ಡೆಸಿಮೀಟರ್ ಚಿತ್ರಣದ ವಿಶ್ಲೇಷಣೆಗಾಗಿ ಚಿತ್ರ ಸಂಸ್ಕರಣೆ ಮತ್ತು ವರ್ಗೀಕರಣ ಕಾರ್ಯವಿಧಾನಗಳು
ವ್ಯಾಪ್ತಿಯ ಪ್ರದೇಶಗಳು. GISci. ರಿಮೋಟ್ ಸೆನ್ಸ್. 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. ರೇಂಜ್ಲ್ಯಾಂಡ್ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ಮಾನಿಟರಿಂಗ್ಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು: ಎರಡು ವ್ಯವಸ್ಥೆಗಳ ಹೋಲಿಕೆ. ASPRS ವಾರ್ಷಿಕ ಸಮ್ಮೇಳನದ ಪ್ರಕ್ರಿಯೆಗಳು.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. ಸ್ಥಳೀಯ ಹುಲ್ಲುಗಾವಲುಗಳಲ್ಲಿ ಕಳೆ ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ತೆರೆದ ಮೂಲ ಕೆಲಸದ ಹರಿವು
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನವನ್ನು ಬಳಸುವುದು: ರುಮೆಕ್ಸ್ ಆಬ್ಟುಸಿಫೋಲಿಯಸ್ ಅನ್ನು ಕೇಸ್ ಸ್ಟಡಿಯಾಗಿ ಬಳಸುವುದು. ಯುರ್. ಜೆ.ರಿಮೋಟ್ ಸೆನ್ಸ್. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
ಲ್ಯಾಂಬರ್ಟ್, DM, ಲೋವೆನ್ಬರ್ಗ್-ಡೆಬೋರ್, ಜೆ., ಗ್ರಿಫಿನ್, ಟಿಡಬ್ಲ್ಯೂ, ಪಿಯೋನ್, ಜೆ., ಪೇನ್, ಟಿ., ಡಾಬರ್ಕೋವ್, ಎಸ್ಜಿ, 2004. ಅಡಾಪ್ಷನ್, ಲಾಭದಾಯಕತೆ ಮತ್ತು ನಿಖರವಾದ ಕೃಷಿ ಡೇಟಾವನ್ನು ಉತ್ತಮವಾಗಿ ಬಳಸುವುದು.
ಕೆಲಸದ ಕಾಗದ. ಪರ್ಡ್ಯೂ ವಿಶ್ವವಿದ್ಯಾಲಯ. https://doi.org/10.22004/ag.econ.28615.
ಲೆಲಾಂಗ್, CCD, Burger, P., Jubelin, G., Roux, B., Labbe, S., Baret, F., 2008. ಸಣ್ಣ ಪ್ಲಾಟ್ಗಳಲ್ಲಿ ಗೋಧಿ ಬೆಳೆಗಳ ಪರಿಮಾಣಾತ್ಮಕ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳ ಚಿತ್ರಣಗಳ ಮೌಲ್ಯಮಾಪನ. ಸಂವೇದಕಗಳು 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
ಲಿ, ಸಿ., ನಿಯು, ಬಿ., 2020. ದೊಡ್ಡ ಡೇಟಾ ಮತ್ತು ಇಂಟರ್ನೆಟ್ ವಸ್ತುಗಳ ಆಧಾರದ ಮೇಲೆ ಸ್ಮಾರ್ಟ್ ಕೃಷಿಯ ವಿನ್ಯಾಸ. ಇಂಟ್ J. ಡಿಸ್ಟ್ರಿಬ್ ಸೆನ್ಸ್. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಸ್ಟೀರಿಯೋ ಚಿತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಮೆಕ್ಕೆಜೋಳದ ಮೇಲಾವರಣದ ಎತ್ತರ ಮತ್ತು ಭೂಗತ ಜೀವರಾಶಿಗಳ ದೂರಸ್ಥ ಅಂದಾಜು ಕಡಿಮೆ ವೆಚ್ಚದ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ ವ್ಯವಸ್ಥೆ. ಇಕೋಲ್. ಇಂಡಿ. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
ಲಿಯಾಕೋಸ್, ಕೆಜಿ, ಬುಸಾಟೊ, ಪಿ., ಮೊಶೌ, ಡಿ., ಪಿಯರ್ಸನ್, ಎಸ್., ಬೊಚ್ಟಿಸ್, ಡಿ., 2018. ಕೃಷಿಯಲ್ಲಿ ಯಂತ್ರ ಕಲಿಕೆ: ಒಂದು ವಿಮರ್ಶೆ. ಸಂವೇದಕಗಳು 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. ಮೊಬೈಲ್ ಮಲ್ಟಿ-ಸೆನ್ಸರ್ ವಿಧಾನದೊಂದಿಗೆ ಮೆಕ್ಕೆಜೋಳದ ಗುಣಲಕ್ಷಣಗಳ ದೂರಸ್ಥ, ವೈಮಾನಿಕ ಫಿನೋಟೈಪಿಂಗ್. ಸಸ್ಯ ವಿಧಾನಗಳು 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಯ ಚಿತ್ರಗಳು ಮತ್ತು ಆಳವಾದ ಕಲಿಕೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಸೋರ್ಗಮ್ ಪ್ಯಾನಿಕ್ಲ್ ಪತ್ತೆ ಮತ್ತು ಎಣಿಕೆ. ಮುಂಭಾಗ. ಸಸ್ಯ ವಿಜ್ಞಾನ 11.
ಲಿಯು, ಎಸ್., ಗುವೊ, ಎಲ್., ವೆಬ್, ಎಚ್., ಯಾ, ಎಕ್ಸ್., ಚಾಂಗ್, ಎಕ್ಸ್., 2019. ಕ್ಲೌಡ್ ಕಂಪ್ಯೂಟಿಂಗ್ ಆಧಾರಿತ ಆಧುನಿಕ ಪರಿಸರ-ಕೃಷಿಯ ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ ಮಾನಿಟರಿಂಗ್ ಸಿಸ್ಟಮ್. IEEE ಪ್ರವೇಶ 7, 37050–37058.
Lopez-Granados, ´ F., 2011. ಸೈಟ್-ನಿರ್ದಿಷ್ಟ ಕಳೆ ನಿರ್ವಹಣೆಗಾಗಿ ಕಳೆ ಪತ್ತೆ: ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ನೈಜ-ಸಮಯದ ವಿಧಾನಗಳು. ಕಳೆ ರೆಸ್. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್, ´ ಎಫ್., ಟೊರೆಸ್-ಸ್ಯಾಂಚೆಜ್, ´ ಜೆ., ಡಿ ಕ್ಯಾಸ್ಟ್ರೊ, ಎ.-ಐ., ಸೆರಾನೊ-ಪೆರೆಜ್, ಎ., ಮೆಸಾಸ್ಕಾರ್ಸ್ಕೊಸಾ, ಎಫ್.-ಜೆ., ಪೆನಾ, ˜ ಜೆ.-ಎಂ. , 2016. ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ UAV ಚಿತ್ರಣವನ್ನು ಬಳಸಿಕೊಂಡು ಹುಲ್ಲು ಬೆಳೆಯಲ್ಲಿ ಹುಲ್ಲಿನ ಕಳೆಗಳ ಆಬ್ಜೆಕ್ಟ್-ಆಧಾರಿತ ಆರಂಭಿಕ ಮೇಲ್ವಿಚಾರಣೆ. ಅಗ್ರೋನ್. ಉಳಿಸಿಕೊಳ್ಳಲು. ದೇವ್. 36 (4), 1–12
ಲೋಪೆಜ್-ಗ್ರಾನಡೋಸ್, ಎಫ್., ಟೊರೆಸ್-ಎಸ್´ ಆಂಚೆಜ್, ಜೆ., ಸೆರಾನೊ-ಪೆರೆಜ್, ಎ., ಡಿ ಕ್ಯಾಸ್ಟ್ರೋ, ಎಐ, ಮೆಸಾಸ್ಕಾರ್ಸ್ಕೊಸಾ, ಎಫ್.-ಜೆ., ಪೆನಾ, ˜ ಜೆ.-ಎಂ., 2016. UAV ತಂತ್ರಜ್ಞಾನವನ್ನು ಬಳಸಿಕೊಂಡು ಸೂರ್ಯಕಾಂತಿಯಲ್ಲಿ ಆರಂಭಿಕ ಋತುವಿನ ಕಳೆ ಮ್ಯಾಪಿಂಗ್: ಕಳೆ ಮಿತಿಗಳ ವಿರುದ್ಧ ಸಸ್ಯನಾಶಕ ಚಿಕಿತ್ಸೆಯ ನಕ್ಷೆಗಳ ವ್ಯತ್ಯಾಸ. ನಿಖರ. ಕೃಷಿ. 17 (2), 183–199.
ಲೂಸಿಯರ್, A., Malenovský, Z., ವೆನೆಸ್, T., ವ್ಯಾಲೇಸ್, L., 2014. HyperUAS - ಮಲ್ಟಿರೋಟರ್ ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಯಿಂದ ಇಮೇಜಿಂಗ್ ಸ್ಪೆಕ್ಟ್ರೋಸ್ಕೋಪಿ. J. ಫೀಲ್ಡ್ ರಾಬ್. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
ಲುಮ್ಮೆ, ಜೆ., ಕರ್ಜಲೈನೆನ್, ಎಂ., ಕಾರ್ಟಿನೆನ್, ಹೆಚ್., ಕುಕ್ಕೊ, ಎ., ಹೈಪ್ಪಾ, ¨ ಜೆ., ಹೈಪ್ಪ್ ಎ, ಎಚ್., ಜಾಕ್ಕೋಲಾ, ಎ., & ಕ್ಲೀಮೊಲಾ, ಜೆ., 2008. ಟೆರೆಸ್ಟ್ರಿಯಲ್ ಲೇಸರ್ ಸ್ಕ್ಯಾನಿಂಗ್ ಕೃಷಿ ಬೆಳೆಗಳು. ಜೆಜೆಯಲ್ಲಿ
ಚೆನ್ ಜೆ. ಮಾಸ್ ಎಚ್–ಜಿ. (ಸಂ), ಫೋಟೋಗ್ರಾಮೆಟ್ರಿಯ ಇಂಟರ್ನ್ಯಾಷನಲ್ ಆರ್ಕೈವ್ಸ್, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಸ್ಪೇಷಿಯಲ್ ಇನ್ಫರ್ಮೇಷನ್ ಸೈನ್ಸಸ್-ISPRS ಆರ್ಕೈವ್ಸ್ (ಸಂಪುಟ. 37, ಪುಟಗಳು. 563-566).
ಇಂಟರ್ನ್ಯಾಷನಲ್ ಸೊಸೈಟಿ ಫಾರ್ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ ಮತ್ತು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. ಮೇಲ್ವಿಚಾರಣೆಯ ವಸ್ತು ಆಧಾರಿತ ಭೂ-ಕವರ್ ಚಿತ್ರ ವರ್ಗೀಕರಣದ ವಿಮರ್ಶೆ. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
ಮೇಸ್, WH, ಸ್ಟೆಪ್ಪೆ, ಕೆ., 2019. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳೊಂದಿಗೆ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ಗಾಗಿ ದೃಷ್ಟಿಕೋನಗಳು. ಟ್ರೆಂಡ್ಸ್ ಪ್ಲಾಂಟ್ Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
ಮೈಮೈತಿಜಿಯಾಂಗ್, ಎಂ., ಗುಲಾಮ್, ಎ., ಸಿಡಿಕೆ, ಪಿ., ಹಾರ್ಟ್ಲಿಂಗ್, ಎಸ್., ಮೈಮೈಟಿಯಿಂಗ್, ಎಂ., ಪೀಟರ್ಸನ್, ಕೆ., ಶೇವರ್ಸ್, ಇ., ಫಿಶ್ಮನ್, ಜೆ., ಪೀಟರ್ಸನ್, ಜೆ., ಕದಮ್, ಎಸ್., ಬರ್ಕೆನ್, ಜೆ., ಫ್ರಿಟ್ಸ್ಚಿ, ಎಫ್., 2017.
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆ (UAS) - ಬಹು-ಸಂವೇದಕ ಡೇಟಾ ಸಮ್ಮಿಳನ ಮತ್ತು ತೀವ್ರ ಕಲಿಕೆಯ ಯಂತ್ರವನ್ನು ಬಳಸಿಕೊಂಡು ಸೋಯಾಬೀನ್ನ ಫಿನೋಟೈಪಿಂಗ್. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. ಮೈಮೈತಿಜಿಯಾಂಗ್, ಎಂ., ಸಗಾನ್, ವಿ., ಸಿಡಿಕೆ, ಪಿ., ದಲೋಯೆ, ಎಎಮ್, ಎರ್ಕ್ಬೋಲ್, ಎಚ್., ಫ್ರಿಟ್ಸ್ಚಿ, ಎಫ್ಬಿ, 2020.
ಉಪಗ್ರಹ/UAV ಡೇಟಾ ಸಮ್ಮಿಳನ ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಬೆಳೆ ಮೇಲ್ವಿಚಾರಣೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (9), 1357. https://doi.org/10.3390/rs12091357.
ಮ್ಯಾನ್ಫ್ರೆಡಾ, ಎಸ್., ಮ್ಯಾಕ್ಕೇಬ್, ಎಂ., ಮಿಲ್ಲರ್, ಪಿ., ಲ್ಯೂಕಾಸ್, ಆರ್., ಪಜುಲೋ ಮ್ಯಾಡ್ರಿಗಲ್, ವಿ., ಮಲ್ಲಿನಿಸ್, ಜಿ., ಬೆನ್ ಡೋರ್, ಇ., ಹೆಲ್ಮನ್, ಡಿ., ಎಸ್ಟೆಸ್, ಎಲ್., ಸಿರಾಲೊ, ಜಿ ., ಮುಲ್ಲೆರೋವಾ, ´ ಜೆ., ಟೌರೊ, ಎಫ್., ಡಿ ಲಿಮಾ, ಎಂ., ಡಿ
ಲಿಮಾ, ಜೆ., ಮಾಲ್ಟೀಸ್, ಎ., ಫ್ರಾನ್ಸಿಸ್, ಎಫ್., ಕೇಲರ್, ಕೆ., ಕೊಹ್ವ್, ಎಂ., ಪರ್ಕ್ಸ್, ಎಂ., ರೂಯಿಜ್-ಪೆರೆಜ್, ಜಿ., ಸು, ಝಡ್., ವಿಕೊ, ಜಿ., ಟಾಥ್ , ಬಿ., 2018. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಗಳ ಬಳಕೆಯ ಕುರಿತು
ಪರಿಸರ ಮೇಲ್ವಿಚಾರಣೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (4), 641.
ಮರಿಂಕೊ, RA, 1998. ಪ್ರಬಂಧಗಳಲ್ಲಿ ಮಹಿಳಾ ಅಧ್ಯಯನದ ಜರ್ನಲ್ಗಳಿಗೆ ಉಲ್ಲೇಖಗಳು, 1989 ಮತ್ತು ದಿ ಸೀರಿಯಲ್ಸ್ ಲೈಬ್ರೇರಿಯನ್ 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
ಮಸ್ರೂರ್, ಆರ್., ನಯೀಮ್, ಎಂ., ಎಜಾಜ್, ಡಬ್ಲ್ಯೂ., 2021. UAV-ಸಹಾಯದ ವೈರ್ಲೆಸ್ ನೆಟ್ವರ್ಕ್ಗಳಲ್ಲಿ ಸಂಪನ್ಮೂಲ ನಿರ್ವಹಣೆ: ಆಪ್ಟಿಮೈಸೇಶನ್ ದೃಷ್ಟಿಕೋನ. ತಾತ್ಕಾಲಿಕ ನೆಟ್ವರ್ಕ್. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್, ಥರ್ಮಲ್ ಮತ್ತು RGB ಹೈ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಗಳ ಆಧಾರದ ಮೇಲೆ ಮಲ್ಟಿಸೆನ್ಸರ್ UAV ಪ್ಲಾಟ್ಫಾರ್ಮ್ನ ಪ್ರಾಯೋಗಿಕ ಅಪ್ಲಿಕೇಶನ್ಗಳು ನಿಖರತೆಯಲ್ಲಿ
ದ್ರಾಕ್ಷಿ ಕೃಷಿ. ಕೃಷಿ 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. ಸಾಂಪ್ರದಾಯಿಕ NDVI ಸೂಚ್ಯಂಕವನ್ನು ಮೀರಿ ನಿಖರವಾದ ದ್ರಾಕ್ಷಾರಸದಲ್ಲಿ UAV ಯ ಮುಖ್ಯವಾಹಿನಿಯ ಬಳಕೆಗೆ ಪ್ರಮುಖ ಅಂಶವಾಗಿದೆ. ವಿಜ್ಞಾನ ರೆಪ್. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
ಮ್ಯಾಟೆಸ್, ಎ., ಟೊಸ್ಕಾನೊ, ಪಿ., ಡಿ ಗೆನ್ನಾರೊ, ಎಸ್ಎಫ್, ಜೆನೆಸಿಯೊ, ಎಲ್., ವಕಾರಿ, ಎಫ್ಪಿ, ಪ್ರಿಮಿಸೆರಿಯೊ, ಜೆ., ಬೆಲ್ಲಿ, ಸಿ., ಝಲ್ಡೆ, ಎ., ಬಿಯಾನ್ಕೋನಿ, ಆರ್., ಜಿಯೋಲಿ, ಬಿ., 2015 UAV, ವಿಮಾನಗಳ ಅಂತರ ಹೋಲಿಕೆ
ಮತ್ತು ನಿಖರವಾದ ವೈಟಿಕಲ್ಚರ್ಗಾಗಿ ಉಪಗ್ರಹ ದೂರಸಂವೇದಿ ವೇದಿಕೆಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV ಮತ್ತು ನಿಖರತೆಗಾಗಿ ಉಪಗ್ರಹ-ಚಾಲಿತ ಸಸ್ಯವರ್ಗದ ಸೂಚ್ಯಂಕದ ಯಂತ್ರ ಕಲಿಕೆ ಆಧಾರಿತ ಪರಿಷ್ಕರಣೆ
ಕೃಷಿ. ಸಂವೇದಕಗಳು 20 (9), 2530. https://doi.org/10.3390/s20092530.
ಮೆಕೇನ್, KW, 1990. ಬೌದ್ಧಿಕ ಜಾಗದಲ್ಲಿ ಮ್ಯಾಪಿಂಗ್ ಲೇಖಕರು: ತಾಂತ್ರಿಕ ಅವಲೋಕನ. ಜಾಮ್. Soc. ಮಾಹಿತಿ. ವಿಜ್ಞಾನ 41 (6), 433–443.
ಮೈನೆನ್, BU, ರಾಬಿನ್ಸನ್, DT, 2021. ಕೃಷಿ ಸವೆತ ಮಾಡೆಲಿಂಗ್: UAV ಸಮಯ-ಸರಣಿ ಡೇಟಾವನ್ನು ಬಳಸಿಕೊಂಡು USLE ಮತ್ತು WEPP ಕ್ಷೇತ್ರ-ಪ್ರಮಾಣದ ಸವೆತ ಅಂದಾಜುಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವುದು. ಪರಿಸರ. ಮಾಡೆಲ್. ಸಾಫ್ಟ್ವೇರ್ 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
ಮೆಲ್ವಿಲ್ಲೆ, ಬಿ., ಲೂಸಿಯರ್, ಎ., ಆರ್ಯಲ್, ಜೆ., 2019. ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಅನ್ ಮ್ಯಾನ್ಡ್ ಏರ್ಕ್ರಾಫ್ಟ್ ಸಿಸ್ಟಮ್ (ಯುಎಎಸ್) ಚಿತ್ರಣವನ್ನು ಬಳಸಿಕೊಂಡು ತಗ್ಗು ಪ್ರದೇಶದ ಸ್ಥಳೀಯ ಹುಲ್ಲುಗಾವಲು ಸಮುದಾಯಗಳ ವರ್ಗೀಕರಣ
ಟ್ಯಾಸ್ಮೆನಿಯನ್ ಮಿಡ್ಲ್ಯಾಂಡ್ಸ್. ಡ್ರೋನ್ಸ್ 3 (1), 5.
ಮೆಸ್ಸಿನಾ, ಜಿ., ಮೊಡಿಕಾ, ಜಿ., 2020. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ UAV ಉಷ್ಣ ಚಿತ್ರಣದ ಅಪ್ಲಿಕೇಶನ್ಗಳು: ಕಲೆಯ ಸ್ಥಿತಿ ಮತ್ತು ಭವಿಷ್ಯದ ಸಂಶೋಧನಾ ದೃಷ್ಟಿಕೋನ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 12 (9), https://doi.org/10.3390/rs12091491.
ಮಿಶ್ರಾ, ಡಿ., ಲುವೊ, ಝಡ್., ಜಿಯಾಂಗ್, ಎಸ್., ಪಾಪಡೋಪೌಲೋಸ್, ಟಿ., ದುಬೆ, ಆರ್., 2017. ದೊಡ್ಡ ಡೇಟಾದ ಮೇಲೆ ಗ್ರಂಥಸೂಚಿ ಅಧ್ಯಯನ: ಪರಿಕಲ್ಪನೆಗಳು, ಪ್ರವೃತ್ತಿಗಳು ಮತ್ತು ಸವಾಲುಗಳು. ವ್ಯಾಪಾರ ಪ್ರಕ್ರಿಯೆ ನಿರ್ವಾಹಕ. ಜೆ. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. ಕ್ಷೇತ್ರ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡಿರುವ ಜೀವನ ಚಕ್ರ ಡೇಟಾಸೆಟ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಬೆಳೆ ಸುಧಾರಣೆ. ಮುಂಭಾಗ. ಸಸ್ಯ ವಿಜ್ಞಾನ 6 https://doi.org/10.3389/
fpls.2015.00740.
ಮೊಗಿಲಿ, UM.R., ದೀಪಕ್, BBVL, 2018. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಡ್ರೋನ್ ವ್ಯವಸ್ಥೆಗಳ ಅನ್ವಯದ ಕುರಿತು ವಿಮರ್ಶೆ. ಪ್ರೊಸೆಡಿಯಾ ಕಂಪ್ಯೂಟ್. ವಿಜ್ಞಾನ 133, 502–509.
ಮೊಹರಾನಾ, ಎಸ್., ದತ್ತಾ, ಎಸ್., 2016. ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಣದಿಂದ ಅಕ್ಕಿಯ ಕ್ಲೋರೊಫಿಲ್ ಮತ್ತು ನೈಟ್ರೋಜನ್ ಅಂಶದ ಪ್ರಾದೇಶಿಕ ವ್ಯತ್ಯಾಸ. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 122, 17–29.
ಮುವಾಂಗ್ಪ್ರಥುಬ್, ಜೆ., ಬೂನ್ನಮ್, ಎನ್., ಕಜೋರ್ನ್ಕಾಸಿರತ್, ಎಸ್., ಲೆಕ್ಬಾಂಗ್ಪಾಂಗ್, ಎನ್., ವನಿಚ್ಸೊಂಬಾಟ್, ಎ.,
ನಿಲ್ಲಾರ್, ಪಿ., 2019. ಸ್ಮಾರ್ಟ್ ಫಾರ್ಮ್ಗಾಗಿ ಐಒಟಿ ಮತ್ತು ಕೃಷಿ ಡೇಟಾ ವಿಶ್ಲೇಷಣೆ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 156, 467–474.
ನಾನ್ಸೆನ್, ಸಿ., ಎಲಿಯಟ್, ಎನ್., 2016. ಕೀಟಶಾಸ್ತ್ರದಲ್ಲಿ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಪ್ರತಿಫಲಿತ ಪ್ರೊಫೈಲಿಂಗ್. ಅಣ್ಣು. ರೆವ್ ಎಂಟೊಮೊಲ್. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. ಕೃಷಿಯಲ್ಲಿ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮ್ಯಾಪಿಂಗ್: ಸ್ವಾಯತ್ತ ಕ್ವಾಡ್ಕಾಪ್ಟರ್ UAV ಬಳಸಿಕೊಂಡು ಭೂಪ್ರದೇಶ ಮೊಸಾಯಿಕ್. ಇಂಟ್ ಕಾನ್ಫರೆನ್ಸ್
ಮಾನವರಹಿತ ವಿಮಾನ ಸಿಸ್ಟ್. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. ಡ್ರೋನ್ ವಸ್ತುಗಳ ಇಂಟರ್ನೆಟ್ (Iodt): ಸ್ಮಾರ್ಟ್ ಡ್ರೋನ್ಗಳ ಭವಿಷ್ಯದ ಕಲ್ಪನೆ. ಅಡ್ವ. ಇಂಟೆಲ್. ಸಿಸ್ಟ್. ಕಂಪ್ಯೂಟ್. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. ಮೈಕ್ರೋ UAV ಗಾಗಿ ಹಗುರ-ತೂಕದ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಸಂವೇದಕ - ಅತಿ ಹೆಚ್ಚು ರೆಸಲ್ಯೂಶನ್ ಏರ್ಬೋರ್ನ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ಗೆ ಅವಕಾಶಗಳು. ಇಂಟ್ ಕಮಾನು ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. Inf. ವಿಜ್ಞಾನ 37 (B1), 1193–1200.
ನೆಗಾಶ್, ಎಲ್., ಕಿಮ್, ಎಚ್.-ವೈ., ಚೋಯ್, ಎಚ್.-ಎಲ್., 2019. ಕೃಷಿಯಲ್ಲಿ ಉದಯೋನ್ಮುಖ UAV ಅಪ್ಲಿಕೇಶನ್ಗಳು. ಇನ್: 2019 7ನೇ ರೋಬೋಟ್ ಇಂಟೆಲಿಜೆನ್ಸ್ ಟೆಕ್ನಾಲಜಿ ಮತ್ತು ಅಂತರಾಷ್ಟ್ರೀಯ ಸಮ್ಮೇಳನ
ಅಪ್ಲಿಕೇಶನ್ಗಳು (RITA), ಪುಟಗಳು. 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
ನೆರೂರ್, ಎಸ್ಪಿ, ರಶೀದ್, ಎಎ, ನಟರಾಜನ್, ವಿ., 2008. ಕಾರ್ಯತಂತ್ರದ ನಿರ್ವಹಣೆ ಕ್ಷೇತ್ರದ ಬೌದ್ಧಿಕ ರಚನೆ: ಲೇಖಕರ ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆ. ತಂತ್ರ. ಮನಗ್. ಜೆ. 29 (3),
319-336.
ನ್ಯೂಪಾನ್, ಕೆ., ಬೈಸಲ್-ಗುರೆಲ್, ಎಫ್., 2021. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಸಸ್ಯ ರೋಗಗಳ ಸ್ವಯಂಚಾಲಿತ ಗುರುತಿಸುವಿಕೆ ಮತ್ತು ಮೇಲ್ವಿಚಾರಣೆ: ಒಂದು ವಿಮರ್ಶೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. 3D ಮ್ಯಾಪಿಂಗ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗಾಗಿ UAV: ಒಂದು ವಿಮರ್ಶೆ. ಅಪ್ಲಿಕೇಶನ್ ಜಿಯೋಮ್ಯಾಟಿಕ್ಸ್ 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
ನಿಯು, ಹೆಚ್., ಹಾಲೆನ್ಬೆಕ್, ಡಿ., ಝಾವೋ, ಟಿ., ವಾಂಗ್, ಡಿ., ಚೆನ್, ವೈ., 2020. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಸಣ್ಣ UAV ಗಳೊಂದಿಗೆ ಆವಿಯಾಗುವಿಕೆ ಅಂದಾಜು. ಸಂವೇದಕಗಳು 20 (22), 6427. https://
doi.org/10.3390/s20226427.
ಒಸರೆಹ್, ಎಫ್., 1996. ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ಸ್, ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಸಹ-ಉಲ್ಲೇಖ ವಿಶ್ಲೇಷಣೆ. ಎ ರಿವ್ಯೂ ಆಫ್ ಲಿಟರೇಚರ್ I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, ಸಂವೇದಕಗಳು ಮತ್ತು ಕೃಷಿ ಅರಣ್ಯದಲ್ಲಿ ಡೇಟಾ ಸಂಸ್ಕರಣೆ: ಪ್ರಾಯೋಗಿಕ ಅನ್ವಯಗಳ ಕಡೆಗೆ ಒಂದು ವಿಮರ್ಶೆ. ಇಂಟ್ ಜೆ. ರಿಮೋಟ್ ಸೆನ್ಸ್. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
ಪಾಂಡೆ, ಯುಎಸ್, ಪ್ರತಿಹಸ್ತ್, ಎಕೆ, ಆರ್ಯಲ್, ಜೆ., ಕಾಯಸ್ಥ, ಆರ್ಬಿ, 2020. ಏಕದಳ ಬೆಳೆಗಳಿಗೆ ಡ್ರೋನ್ ಆಧಾರಿತ ಡೇಟಾ ಪರಿಹಾರಗಳ ಕುರಿತು ವಿಮರ್ಶೆ. ಡ್ರೋನ್ಸ್ 4 (3), 1–29. https://doi.org/10.3390/
ಡ್ರೋನ್ಸ್ 4030041.
ಪಾರ್ಸೇಯನ್, ಎಂ., ಶಹಾಬಿ, ಎಂ., ಹಸನ್ಪೋರ್, ಎಚ್., 2020. ಇಮೇಜ್ ಪ್ರೊಸೆಸಿಂಗ್ ಮತ್ತು ಕೃತಕ ನರಮಂಡಲವನ್ನು ಬಳಸಿಕೊಂಡು ಎಳ್ಳಿನ ಎಣ್ಣೆ ಮತ್ತು ಪ್ರೋಟೀನ್ ಅಂಶವನ್ನು ಅಂದಾಜು ಮಾಡುವುದು. ಜಾಮ್. ತೈಲ
ರಸಾಯನಶಾಸ್ತ್ರಜ್ಞರ Soc. 97 (7), 691–702.
ಪೆನಾ, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., ಆಬ್ಜೆಕ್ಟ್-ಆಧಾರಿತ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಆರಂಭಿಕ-ಋತುವಿನ ಮೆಕ್ಕೆ ಜೋಳದ ಹೊಲಗಳಲ್ಲಿ ವೀಡ್ ಮ್ಯಾಪಿಂಗ್ ನ
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಚಿತ್ರಗಳು. PLoS ONE 8 (10), e77151.
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
Lopez-Granados, ´ F., 2015. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು ಮತ್ತು ಬೆಳೆ ಸಾಲು ಪತ್ತೆ ವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ಸೂರ್ಯಕಾಂತಿ ಬೆಳೆಗಳಲ್ಲಿ ಕಳೆ ಮ್ಯಾಪಿಂಗ್ಗಾಗಿ ಅರೆ-ಮೇಲ್ವಿಚಾರಣೆಯ ವ್ಯವಸ್ಥೆ. ಅಪ್ಲಿಕೇಶನ್ ಸಾಫ್ಟ್ ಕಂಪ್ಯೂಟ್. ಜೆ. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಬ್ಲಾಕ್ಚೈನ್ ಆಧಾರಿತ ನೀರು ನಿರ್ವಹಣಾ ವ್ಯವಸ್ಥೆಗಾಗಿ ವಿಶ್ವಾಸಾರ್ಹ ಡೇಟಾ ಮೂಲಗಳಾಗಿ ವೆಚ್ಚ-ಪರಿಣಾಮಕಾರಿ IoT ಸಾಧನಗಳು. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಬುದ್ಧಿವಂತ ಮೇಲ್ವಿಚಾರಣೆಗಾಗಿ ಸುಧಾರಿತ UAV-WSN ವ್ಯವಸ್ಥೆ. ಸಂವೇದಕಗಳು 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. ಪೂರೈಕೆ ಸರಪಳಿಗಳು, ಸಾರಿಗೆ ಮತ್ತು ಲಾಜಿಸ್ಟಿಕ್ಸ್ನಲ್ಲಿ ಬ್ಲಾಕ್ಚೈನ್ ಅಪ್ಲಿಕೇಶನ್ಗಳು: ಸಾಹಿತ್ಯದ ವ್ಯವಸ್ಥಿತ ವಿಮರ್ಶೆ. ಇಂಟ್ ಜೆ. ಪ್ರೊಡ್ ರೆಸ್. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vacari, FP, 2012. ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಹೊಂದಿಕೊಳ್ಳುವ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ.
ನಿಖರ. ಕೃಷಿ. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
ಪ್ರಿಚರ್ಡ್, ಎ., 1969. ಅಂಕಿಅಂಶಗಳ ಗ್ರಂಥಸೂಚಿ ಅಥವಾ ಗ್ರಂಥಮಾಪನ. J. ಡಾಕ್ಯುಮೆಂಟ್. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-ವಾಕರ್, M., 2012. ಪ್ರಾಯೋಗಿಕ ಕ್ಷೇತ್ರಗಳು ಮತ್ತು ಬೆಳೆಗಳ ಮೌಲ್ಯಮಾಪನಕ್ಕಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನದ (UAV) ಸೂಕ್ತತೆ. ಕೃಷಿ 99 (4), 431–436.
ಪುರಿ, ವಿ., ನಯ್ಯರ್, ಎ., ರಾಜಾ, ಎಲ್., 2017. ಕೃಷಿ ಡ್ರೋನ್ಗಳು: ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಆಧುನಿಕ ಪ್ರಗತಿ. ಜೆ. ಸ್ಟ್ಯಾಟಿಸ್ ಮನಗ್. ಸಿಸ್ಟ್. 20 (4), 507–518.
ರಾಡೋಗ್ಲೋ-ಗ್ರಾಮಟಿಕಿಸ್, ಪಿ., ಸರಿಗಿಯಾನಿಡಿಸ್, ಪಿ., ಲಗ್ಕಾಸ್, ಟಿ., ಮೊಸ್ಕೊಲಿಯೊಸ್, I., 2020. ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ UAV ಅಪ್ಲಿಕೇಶನ್ಗಳ ಸಂಕಲನ. ಕಂಪ್ಯೂಟ್. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
ರಮೇಶ್, ಕೆವಿ, ರಾಕೇಶ್, ವಿ., ಪ್ರಕಾಶ್ ರಾವ್, ಇವಿಎಸ್, 2020. ಕೃಷಿ ಸಂಶೋಧನೆಯಲ್ಲಿ ದೊಡ್ಡ ಡೇಟಾ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯ ಅಪ್ಲಿಕೇಶನ್. ಭಾರತೀಯ ಜೆ. ಅಗ್ರೋನ್. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. ಕೃಷಿ ಮತ್ತು ಅರಣ್ಯ ಅಧ್ಯಯನಗಳಲ್ಲಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳ ಬಳಕೆಯ ಕುರಿತು ಗ್ರಂಥಮಾಪನ ವಿಶ್ಲೇಷಣೆ. ಇಂಟ್ J. ರಿಮೋಟ್ ಸೆನ್ಸ್. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
ರಾಸ್ಮುಸ್ಸೆನ್, ಜೆ., ನೀಲ್ಸನ್, ಜೆ., ಗಾರ್ಸಿಯಾ-ರೂಯಿಜ್, ಎಫ್., ಕ್ರಿಸ್ಟೇನ್ಸನ್, ಎಸ್., ಸ್ಟ್ರೀಬಿಗ್, ಜೆಸಿ, ಲೊಟ್ಜ್, ಬಿ., 2013.
ಕಳೆ ಸಂಶೋಧನೆಯಲ್ಲಿ ಸಣ್ಣ ಮಾನವರಹಿತ ವಿಮಾನ ವ್ಯವಸ್ಥೆಗಳ (UAS) ಸಂಭಾವ್ಯ ಬಳಕೆಗಳು. ಕಳೆ ರೆಸ್. 53 (4), 242–248.
ರಾಸ್ಮುಸ್ಸೆನ್, ಜೆ., ಎನ್ಟಾಕೋಸ್, ಜಿ., ನೀಲ್ಸನ್, ಜೆ., ಸ್ವೆನ್ಸ್ಗಾರ್ಡ್, ಜೆ., ಪೌಲ್ಸೆನ್, ಆರ್ಎನ್, ಕ್ರಿಸ್ಟೇನ್ಸೆನ್, ಎಸ್., ಗ್ರಾಹಕ-ದರ್ಜೆಯ ಕ್ಯಾಮೆರಾಗಳಿಂದ ಪಡೆದ ಸಸ್ಯವರ್ಗ ಸೂಚ್ಯಂಕಗಳು
ಪ್ರಾಯೋಗಿಕ ಪ್ಲಾಟ್ಗಳನ್ನು ನಿರ್ಣಯಿಸಲು UAVಗಳು ಸಾಕಷ್ಟು ವಿಶ್ವಾಸಾರ್ಹವೇ? ಯುರ್. ಜೆ. ಅಗ್ರೋನ್. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
ರೆಜೆಬ್, ಎ., ರೆಜೆಬ್, ಕೆ., ಅಬ್ದೊಲ್ಲಾಹಿ, ಎ., ಜೈಲಾನಿ, ಎಸ್., ಇರಾನ್ಮನೇಶ್, ಎಂ., ಘೋಬಖ್ಲೂ, ಎಂ., 2022. ಆಹಾರ ಪೂರೈಕೆ ಸರಪಳಿಗಳಲ್ಲಿ ಡಿಜಿಟಲೀಕರಣ: ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಮರ್ಶೆ ಮತ್ತು ಕೀ-ಮಾರ್ಗ ಮುಖ್ಯ ಮಾರ್ಗ
ವಿಶ್ಲೇಷಣೆ. ಸುಸ್ಥಿರತೆ 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. ಪೂರೈಕೆ ಸರಪಳಿ ನಿರ್ವಹಣೆ ಮತ್ತು ಜಾರಿಗಾಗಿ ಡ್ರೋನ್ಗಳು: ವಿಮರ್ಶೆ ಮತ್ತು ಸಂಶೋಧನಾ ಕಾರ್ಯಸೂಚಿ. ಇಂಟ್ J. ಲಾಜಿಸ್ಟ್. ರೆಸ್. ಅಪ್ಲಿಕೇಶನ್
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. ಲಾಜಿಸ್ಟಿಕ್ಸ್ ಮತ್ತು ಪೂರೈಕೆ ಸರಪಳಿ ನಿರ್ವಹಣೆಯಲ್ಲಿ ಬ್ಲಾಕ್ಚೈನ್ ತಂತ್ರಜ್ಞಾನಗಳು: ಗ್ರಂಥಮಾಪನ ವಿಮರ್ಶೆ. ಲಾಜಿಸ್ಟಿಕ್ಸ್ 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. ಮಾನವೀಯ ಡ್ರೋನ್ಸ್: ಒಂದು ವಿಮರ್ಶೆ ಮತ್ತು ಸಂಶೋಧನಾ ಕಾರ್ಯಸೂಚಿ. ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. ಆರೋಗ್ಯ ರಕ್ಷಣೆಯಲ್ಲಿ ಬ್ಲಾಕ್ಚೈನ್ ಸಂಶೋಧನೆ: ಗ್ರಂಥಮಾಪನ ವಿಮರ್ಶೆ ಮತ್ತು ಪ್ರಸ್ತುತ ಸಂಶೋಧನಾ ಪ್ರವೃತ್ತಿಗಳು. ಡೇಟಾದ ಜೆ., Inf. ಮತ್ತು
ಮನಗ್. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್ ರಿಸರ್ಚ್ ಇನ್ ಸಪ್ಲೈ ಚೈನ್ ಮ್ಯಾನೇಜ್ಮೆಂಟ್ ಮತ್ತು ಲಾಜಿಸ್ಟಿಕ್ಸ್: ಎ ಬಿಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆ. ಇಂಟರ್ನೆಟ್
ವಸ್ತುಗಳ 12, 100318.
ವರದಿಲಿಂಕರ್, 2021. ಗ್ಲೋಬಲ್ ಅಗ್ರಿಕಲ್ಚರ್ ಡ್ರೋನ್ಗಳ ಮಾರುಕಟ್ಟೆಯು ಇಯರ್ಗ್ಲೋಬ್ನ್ಯೂಸ್ವೈರ್ ನ್ಯೂಸ್ ರೂಮ್ನಿಂದ US$15.2 ಬಿಲಿಯನ್ ತಲುಪಲಿದೆ. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- ವರ್ಷ-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. ತಂಪಾಗಿರದ ಥರ್ಮಲ್ ಕ್ಯಾಮೆರಾ ಮಾಪನಾಂಕ ನಿರ್ಣಯ ಮತ್ತು ಆಪ್ಟಿಮೈಸೇಶನ್
ಕೃಷಿಯಲ್ಲಿ UAV ಅನ್ವಯಗಳಿಗೆ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ ಪ್ರಕ್ರಿಯೆ. ಸಂವೇದಕಗಳು (ಸ್ವಿಟ್ಜರ್ಲೆಂಡ್) 17 (10). https://doi.org/10.3390/s17102173.
ರಿವೆರಾ, MA, Pizam, A., 2015. ಆತಿಥ್ಯ ಸಂಶೋಧನೆಯಲ್ಲಿನ ಪ್ರಗತಿ: "ರಾಡ್ನಿ ಡೇಂಜರ್ಫೀಲ್ಡ್ನಿಂದ ಅರೆಥಾ ಫ್ರಾಂಕ್ಲಿನ್ಗೆ". ಇಂಟ್ ಜೆ. ಸಮಕಾಲೀನ ಆಸ್ಪತ್ರೆ. ಮನಗ್. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
ರೋಲ್ಡನ್, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. ಹಸಿರುಮನೆಗಳಲ್ಲಿ ಪರಿಸರ ಅಸ್ಥಿರಗಳನ್ನು ಅಳೆಯಲು ಮಿನಿ-UAV ಆಧಾರಿತ ಸಂವೇದನಾ ವ್ಯವಸ್ಥೆ. ಸಂವೇದಕಗಳು 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. ಗ್ರಾಹಕ-ದರ್ಜೆಯ UAV ಅನ್ನು ವಾಣಿಜ್ಯ ಈರುಳ್ಳಿ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ತಡ-ಋತುವಿನ ಕಳೆ ಪ್ರಾದೇಶಿಕ ವಿತರಣಾ ಮಾದರಿಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಮತ್ತು ವಿಶ್ಲೇಷಿಸಲು ಬಳಸಲಾಗಿದೆ. ನಿಖರ. ಕೃಷಿ. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
ಸಾರಿ, ಹೆಚ್., ಪೆಲ್ಲಿಕ್ಕಾ, ಐ., ಪೆಸೊನೆನ್, ಎಲ್., ಟುವೊಮಿನೆನ್, ಎಸ್., ಹೆಕ್ಕಿಲಾ, ¨ ಜೆ., ಹೋಲ್ಮ್ಲಂಡ್, ಸಿ., ಮ್ಯಾಕಿನೆನ್, ¨ ಜೆ., ಓಜಾಲಾ, ಕೆ., ಆಂಟಿಲಾ, ಟಿ., 2011. ಮಾನವರಹಿತ ಅರಣ್ಯ ಮತ್ತು ಕೃಷಿ ಅನ್ವಯಗಳಿಗಾಗಿ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸ್ಪೆಕ್ಟ್ರಲ್ ಕ್ಯಾಮೆರಾ ವ್ಯವಸ್ಥೆ. ಮುಂದುವರೆಯಲು. SPIE - ಇಂಟ್. Soc. ಆಯ್ಕೆ ಇಂಜಿನ್. 8174 https://doi.org/10.1117/12.897585.
ಸಾಹ್, ಬಿ., ಗುಪ್ತಾ, ಆರ್., ಬನಿ-ಹನಿ, ಡಿ., 2021. ಡ್ರೋನ್ ಲಾಜಿಸ್ಟಿಕ್ಸ್ ಅನ್ನು ಅಳವಡಿಸಲು ಅಡೆತಡೆಗಳ ವಿಶ್ಲೇಷಣೆ. ಇಂಟ್ J. ಲಾಜಿಸ್ಟ್. ರೆಸ್. ಅಪ್ಲಿಕೇಶನ್ 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
ಸಹಾ, ಎಕೆ, ಸಹಾ, ಜೆ., ರೇ, ಆರ್., ಸಿರ್ಕಾರ್, ಎಸ್., ದತ್ತಾ, ಎಸ್., ಚಟ್ಟೋಪಾಧ್ಯಾಯ, ಎಸ್ಪಿ, & ಸಹಾ, ಎಚ್ಎನ್, ಐಒಟಿ ಆಧಾರಿತ ಡ್ರೋನ್ ಕೃಷಿ ಕ್ಷೇತ್ರದಲ್ಲಿ ಬೆಳೆ ಗುಣಮಟ್ಟ ಸುಧಾರಣೆಗಾಗಿ. SH ನಲ್ಲಿ
N. ಚಕ್ರವರ್ತಿ S. (ಸಂ), 2018 IEEE 8ನೇ ವಾರ್ಷಿಕ ಕಂಪ್ಯೂಟಿಂಗ್ ಮತ್ತು ಸಂವಹನ ಕಾರ್ಯಾಗಾರ ಮತ್ತು ಸಮ್ಮೇಳನ, CCWC 2018 (ಸಂಪುಟಗಳು. 2018-ಜನವರಿ, ಪುಟಗಳು. 612–615). ಸಂಸ್ಥೆ
ಎಲೆಕ್ಟ್ರಿಕಲ್ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಇಂಜಿನಿಯರ್ಸ್ ಇಂಕ್. doi: 10.1109/CCWC.2018.8301662.
ಸಾಯಿ ವಿನೀತ್, ಕೆವಿ, ವರ ಪ್ರಸಾದ್, ವೈಆರ್, ದುಬೆ, ಎಸ್ಆರ್, ವೆಂಕಟರಾಮನ್, ಎಚ್., 2019. ಎಲ್ಇಡಿಕಾಮ್: ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಒಂದು ಕಾದಂಬರಿ ಮತ್ತು ಸಮರ್ಥ ಎಲ್ಇಡಿ ಆಧಾರಿತ ಸಂವಹನ. IEEE ಕಾನ್ಫರೆನ್ಸ್ ಮಾಹಿತಿ. ಕಮ್ಯೂನ್. ಟೆಕ್ನೋಲ್. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
ಸಲಾಮಿ, ಇ., ಬಾರ್ರಾಡೋ, ಸಿ., ಪಾಸ್ಟರ್, ಇ., 2014. UAV ಹಾರಾಟದ ಪ್ರಯೋಗಗಳನ್ನು ಸಸ್ಯಾಹಾರಿ ಪ್ರದೇಶಗಳ ದೂರದ ಸಂವೇದನೆಗೆ ಅನ್ವಯಿಸಲಾಗಿದೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
ಶಂಕರನ್, ಎಸ್., ಖೋಟ್, ಎಲ್ಆರ್, ಎಸ್ಪಿನೋಜಾ, ಸಿಜೆಡ್, ಜರೋಲ್ಮಸ್ಜೆಡ್, ಎಸ್., ಸಾತುವಲ್ಲಿ, ವಿಆರ್, ವಂಡೆಮಾರ್ಕ್, ಜಿಜೆ, ಮಿಕ್ಲಾಸ್, ಪಿಎನ್, ಕಾರ್ಟರ್, ಎಹೆಚ್, ಪಂಫ್ರೆ, ಎಂಒ, ನೋಲ್ಸ್, ಎನ್ಆರ್ಎನ್, ಪಾವೆಕ್, ಎಂಜೆ, 2015.
ಸಾಲು ಮತ್ತು ಫೀಲ್ಡ್ ಕ್ರಾಪ್ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ ಕಡಿಮೆ-ಎತ್ತರದ, ಹೆಚ್ಚಿನ-ರೆಸಲ್ಯೂಶನ್ ವೈಮಾನಿಕ ಚಿತ್ರಣ ವ್ಯವಸ್ಥೆಗಳು: ಒಂದು ವಿಮರ್ಶೆ. ಯುರ್. ಜೆ. ಅಗ್ರೋನ್. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. ಹೈ-ರೆಸಲ್ಯೂಶನ್ UAV ಆಧಾರಿತ ಥರ್ಮಲ್ ಇಮೇಜಿಂಗ್ ಅಂದಾಜು ಮಾಡಲು
ದ್ರಾಕ್ಷಿತೋಟದೊಳಗೆ ಸಸ್ಯ ನೀರಿನ ಸ್ಥಿತಿಯ ತ್ವರಿತ ಮತ್ತು ಕಾಲೋಚಿತ ವ್ಯತ್ಯಾಸ. ಕೃಷಿ. ವಾಟರ್ ಮ್ಯಾನೇಗ್. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
ಸರ್ಲಿ, CC, ಡುಬಿನ್ಸ್ಕಿ, EK, ಹೋಮ್ಸ್, KL, 2010. ಉಲ್ಲೇಖದ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಮೀರಿ: ಸಂಶೋಧನಾ ಪ್ರಭಾವದ ಮೌಲ್ಯಮಾಪನಕ್ಕಾಗಿ ಒಂದು ಮಾದರಿ. ಜೆ. ಮೆಡ್ ಗ್ರಂಥಾಲಯ ಅಸೋಸಿ. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
ಸ್ಕೇಪ್ಮ್ಯಾನ್, ME, ಉಸ್ಟಿನ್, SL, ಪ್ಲಾಜಾ, AJ, ಪೇಂಟರ್, TH, ವೆರೆಲ್ಸ್ಟ್, J., ಲಿಯಾಂಗ್, S., 2009. ಅರ್ಥ್ ಸಿಸ್ಟಮ್ ಸೈನ್ಸ್ ಸಂಬಂಧಿತ ಇಮೇಜಿಂಗ್ ಸ್ಪೆಕ್ಟ್ರೋಸ್ಕೋಪಿ-ಒಂದು ಮೌಲ್ಯಮಾಪನ. ರಿಮೋಟ್ ಸೆನ್ಸ್. ಪರಿಸರ. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. ಕಡಿಮೆ-ವೆಚ್ಚದ UAV ಯೊಂದಿಗೆ ಚಳಿಗಾಲದ ಗೋಧಿ ಬೆಳೆಗಳ ಕೃಷಿ ನಿಯತಾಂಕಗಳನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವುದು
ಚಿತ್ರಣ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. ಮೇಲಿನ ನಿಖರವಾದ ಏರೋಬಯಾಲಾಜಿಕಲ್ ಮಾದರಿಗಾಗಿ ಸ್ವಾಯತ್ತ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನದ ಅಭಿವೃದ್ಧಿ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್
ಕೃಷಿ ಕ್ಷೇತ್ರಗಳು. J. ಫೀಲ್ಡ್ ರಾಬ್. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
ಶಾದ್ರಿನ್, ಡಿ., ಮೆನ್ಶಿಕೋವ್, ಎ., ಸೊಮೊವ್, ಎ., ಬೋರ್ನೆಮನ್, ಜಿ., ಹೌಸ್ಲೇಜ್, ಜೆ., ಫೆಡೋರೊವ್, ಎಂ.,
ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯೊಂದಿಗೆ ಎಂಬೆಡೆಡ್ ಸೆನ್ಸಿಂಗ್ ಮೂಲಕ ನಿಖರವಾದ ಕೃಷಿಯನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುವುದು. IEEE ಟ್ರಾನ್ಸ್. ಇನ್ಸ್ಟ್ರಮ್. ಮೀಸ್. 69 (7), 4103–4113.
ಶಖತ್ರೆಹ್, ಹೆಚ್., ಸವಾಲ್ಮೆಹ್, ಎಹೆಚ್, ಅಲ್-ಫುಕಾಹಾ, ಎ., ಡೌ, ಝಡ್., ಅಲ್ಮೈಟಾ, ಇ., ಖಲೀಲ್, ಐ.,
ಓಥ್ಮನ್, NS, ಖ್ರೀಶಾ, A., Guizani, M., 2019. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು (UAVs): ನಾಗರಿಕ ಅನ್ವಯಿಕೆಗಳು ಮತ್ತು ಪ್ರಮುಖ ಸಂಶೋಧನಾ ಸವಾಲುಗಳ ಮೇಲೆ ಸಮೀಕ್ಷೆ. IEEE ಪ್ರವೇಶ 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
ಶಕೂರ್, ಎನ್., ನಾರ್ತ್ರಪ್, ಡಿ., ಮುರ್ರೆ, ಎಸ್., ಮೊಕ್ಲರ್, ಟಿಸಿ, 2019. ಬಿಗ್ ಡೇಟಾ ಚಾಲಿತ ಕೃಷಿ: ಸಸ್ಯ ಸಂತಾನೋತ್ಪತ್ತಿ, ಜೀನೋಮಿಕ್ಸ್ ಮತ್ತು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನಲ್ಲಿ ದೊಡ್ಡ ಡೇಟಾ ವಿಶ್ಲೇಷಣೆ
ಬೆಳೆ ಉತ್ಪಾದಕತೆಯನ್ನು ಹೆಚ್ಚಿಸಲು ತಂತ್ರಜ್ಞಾನಗಳು. ಸಸ್ಯ ವಿದ್ಯಮಾನ ಜೆ. 2 (1), 1–8.
ಶರ್ಮಾ, ಬಿಕೆ, ಚಂದ್ರ, ಜಿ., ಮಿಶ್ರಾ, ವಿಪಿ, 2019. ಫೋರೆನ್ಸಿಕ್ ತನಿಖೆಗಳಲ್ಲಿ ಯುಎವಿ ಮತ್ತು ಎಐನ ತುಲನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಪರಿಣಾಮಗಳು. ಇನ್: ಪ್ರೊಸೀಡಿಂಗ್ಸ್ - 2019 ಅಮಿಟಿ ಇಂಟರ್ನ್ಯಾಷನಲ್
ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯ ಸಮಾವೇಶ. https://doi.org/10.1109/AICAI.2019.8701407.
ಶರ್ಮಾ, ಆರ್., ಶಿಶೋಡಿಯಾ, ಎ., ಗುಣಶೇಖರನ್, ಎ., ಮಿನ್, ಎಚ್., ಮುನಿಮ್, ZH, 2022. ಪೂರೈಕೆ ಸರಪಳಿ ನಿರ್ವಹಣೆಯಲ್ಲಿ ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯ ಪಾತ್ರ: ಭೂಪ್ರದೇಶವನ್ನು ಮ್ಯಾಪಿಂಗ್ ಮಾಡುವುದು. ಇಂಟ್ ಜೆ.
ಉತ್ಪನ್ನ ರೆಸ್. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
ಶಿ, ವೈ., ಥಾಮಸ್ಸನ್, ಜೆಎ, ಮುರ್ರೆ, ಎಸ್ಸಿ, ಪಗ್, ಎನ್ಎ, ರೂನೇ, ಡಬ್ಲ್ಯುಎಲ್, ಶಫಿಯಾನ್, ಎಸ್., ರಾಜನ್, ಎನ್., ರೌಜ್, ಜಿ., ಮೋರ್ಗಾನ್, ಸಿಎಲ್ಎಸ್, ನೀಲಿ, ಎಚ್ಎಲ್, ರಾಣಾ, ಎ., ಬಾಗವತಿಅನ್ನನ್ , MV,
ಹೆನ್ರಿಕ್ಸನ್, ಜೆ., ಬೌಡೆನ್, ಇ., ವಲಸೆಕ್, ಜೆ., ಓಲ್ಸೆನ್ಹೋಲರ್, ಜೆ., ಬಿಷಪ್, ಎಂಪಿ, ಶೆರಿಡನ್, ಆರ್., ಪುಟ್ಮನ್, ಇಬಿ, ಪೋಪೆಸ್ಕು, ಎಸ್., ಬರ್ಕ್ಸ್, ಟಿ., ಕೋಪ್, ಡಿ., ಇಬ್ರಾಹಿಂ A., ಮೆಕ್ಕಟ್ಚೆನ್, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. ಹೆಚ್ಚಿನ ಥ್ರೂಪುಟ್ ಫಿನೋಟೈಪಿಂಗ್ ಮತ್ತು ಕೃಷಿ ಸಂಶೋಧನೆಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು. ಪ್ಲೋಸ್ ಒನ್
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. ಮಾನವರಹಿತ ವೈಮಾನಿಕವನ್ನು ಬಳಸಿಕೊಂಡು ಇಳುವರಿ-ಸ್ಥಿರತೆಯ ವಲಯಗಳಾದ್ಯಂತ ಮೆಕ್ಕೆ ಜೋಳದ ಸ್ಟ್ಯಾಂಡ್ ವೈವಿಧ್ಯತೆಯನ್ನು ಸೆರೆಹಿಡಿಯುವುದು
ವಾಹನಗಳು (UAV). ಸಂವೇದಕಗಳು 19 (20), 4446. https://doi.org/10.3390/s19204446.
ಸ್ಮಾಲ್, ಎಚ್., 1973. ವೈಜ್ಞಾನಿಕ ಸಾಹಿತ್ಯದಲ್ಲಿ ಸಹ-ಉಲ್ಲೇಖ: ಎರಡು ದಾಖಲೆಗಳ ನಡುವಿನ ಸಂಬಂಧದ ಹೊಸ ಅಳತೆ. ಜಾಮ್. Soc. ಮಾಹಿತಿ. ವಿಜ್ಞಾನ 24 (4), 265–269.
ಸ್ಮಾಲ್, ಎಚ್., ರೋರ್ವಿಗ್, ME, ಲುನಿನ್, LF, 1999. ಸೈಟೇಶನ್ ಮ್ಯಾಪಿಂಗ್ ಮೂಲಕ ವಿಜ್ಞಾನವನ್ನು ದೃಶ್ಯೀಕರಿಸುವುದು. ಜಾಮ್. Soc. ಮಾಹಿತಿ. ವಿಜ್ಞಾನ 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. ದೊಡ್ಡ ಹುಲ್ಲುಗಾವಲು ಪ್ರದೇಶಗಳಲ್ಲಿ ಜಿಯೋಲೊಕೇಟೆಡ್ ವೈಮಾನಿಕ ಚಿತ್ರಗಳೊಂದಿಗೆ ಕಾಡಿನಲ್ಲಿ ದನಗಳ ಎಣಿಕೆ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
ಶ್ರೀವಾಸ್ತವ, ಕೆ., ಪಾಂಡೆ, ಪಿಸಿ, ಶರ್ಮಾ, ಜೆಕೆ, 2020. ಯುಎವಿಗಳನ್ನು ಬಳಸಿಕೊಂಡು ನಿಖರವಾದ ಕೃಷಿಯ ಅನ್ವಯಗಳಲ್ಲಿ ಮಾರ್ಗ ಆಪ್ಟಿಮೈಸೇಶನ್ಗೆ ಒಂದು ವಿಧಾನ. ಡ್ರೋನ್ಸ್ 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
ಸ್ಟಾಫರ್ಡ್, JV, 2000. 21 ನೇ ಶತಮಾನದಲ್ಲಿ ನಿಖರವಾದ ಕೃಷಿಯನ್ನು ಅಳವಡಿಸುವುದು. ಜೆ. ಅಗ್ರಿಕ್ ಇಂಜಿನ್. ರೆಸ್. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನವನ್ನು ಬಳಸಿಕೊಂಡು ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಚಿತ್ರಣದ ಮೂಲಕ ಗೋಧಿ ಬರ ಮೌಲ್ಯಮಾಪನ. 2018 ರಲ್ಲಿ 37 ನೇ ಚೈನೀಸ್ ಕಂಟ್ರೋಲ್ ಕಾನ್ಫರೆನ್ಸ್ (CCC).
ಸು, ಜೆ., ಲಿಯು, ಸಿ., ಕೂಂಬೆಸ್, ಎಂ., ಹು, ಎಕ್ಸ್., ವಾಂಗ್, ಸಿ., ಕ್ಸು, ಎಕ್ಸ್., ಲಿ, ಕ್ಯೂ., ಗುವೋ, ಎಲ್., ಚೆನ್, ಡಬ್ಲ್ಯೂ.-ಹೆಚ್., 2018. ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ UAV ವೈಮಾನಿಕ ಚಿತ್ರಣದಿಂದ ಕಲಿಯುವ ಮೂಲಕ ಗೋಧಿ ಹಳದಿ ತುಕ್ಕು ಮೇಲ್ವಿಚಾರಣೆ.
ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
ಸು, ವೈ., ವಾಂಗ್, ಎಕ್ಸ್., 2021. ದೊಡ್ಡ ಡೇಟಾ ಮೂಲಕ ಸ್ಮಾರ್ಟ್ ಕೃಷಿಯನ್ನು ನಿರ್ಮಿಸುವ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಕೃಷಿ ಆರ್ಥಿಕ ನಿರ್ವಹಣೆಯ ನಾವೀನ್ಯತೆ. ಸಸ್ಟೈನಬಲ್ ಕಂಪ್ಯೂಟ್. Inf. ಸಿಸ್ಟ್. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
ಸುಲ್ಲಿವಾನ್, ಡಿಜಿ, ಫುಲ್ಟನ್, ಜೆಪಿ, ಶಾ, ಜೆಎನ್, ಬ್ಲಾಂಡ್, ಜಿಎಲ್, 2007. ಹತ್ತಿ ಮೇಲಾವರಣದಲ್ಲಿ ನೀರಿನ ಒತ್ತಡವನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಮಾನವರಹಿತ ಉಷ್ಣ ಅತಿಗೆಂಪು ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಯ ಸೂಕ್ಷ್ಮತೆಯನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವುದು. ಟ್ರಾನ್ಸ್ ASABE 50 (6), 1955–1962.
ಸುಮೇಶ್, ಕೆಸಿ, ನಿನ್ಸಾವತ್, ಎಸ್., ಸೋಮ್-ಅರ್ಡ್, ಜೆ., 2021. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನವನ್ನು ಬಳಸಿಕೊಂಡು ಕಬ್ಬಿನ ಇಳುವರಿ ಅಂದಾಜುಗಾಗಿ RGB-ಆಧಾರಿತ ಸಸ್ಯವರ್ಗ ಸೂಚ್ಯಂಕ, ಬೆಳೆ ಮೇಲ್ಮೈ ಮಾದರಿ ಮತ್ತು ವಸ್ತು ಆಧಾರಿತ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ ವಿಧಾನದ ಏಕೀಕರಣ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. ಒಂದು ಹಗುರವಾದ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಮ್ಯಾಪಿಂಗ್ ವ್ಯವಸ್ಥೆ
ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು-ಮೊದಲ ಫಲಿತಾಂಶಗಳು. ಇನ್: 2013 ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜ್ ಮತ್ತು ಸಿಗ್ನಲ್ ಪ್ರೊಸೆಸಿಂಗ್ನಲ್ಲಿನ 5ನೇ ಕಾರ್ಯಾಗಾರ: ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ನಲ್ಲಿ ಎವಲ್ಯೂಷನ್ (WHISPERS), pp. 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
ಸುಮಾಲೈನೆನ್, ಜೆ., ಆಂಡರ್ಸ್, ಎನ್., ಇಕ್ಬಾಲ್, ಎಸ್., ರೋರಿಂಕ್, ಜಿ., ಫ್ರಾಂಕ್, ಜೆ., ವೆಂಟಿಂಗ್, ಪಿ., ಹನ್ನಿಗರ್, ಡಿ., ಬಾರ್ತಲೋಮಿಯಸ್, ಎಚ್., ಬೆಕರ್, ಆರ್., ಕೂಯಿಸ್ಟ್ರಾ, ಎಲ್., 2014. ಹಗುರವಾದ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್
ಮ್ಯಾಪಿಂಗ್ ವ್ಯವಸ್ಥೆ ಮತ್ತು ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳಿಗೆ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿಕ್ ಸಂಸ್ಕರಣಾ ಸರಪಳಿ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 6 (11), 11013–11030. https://doi.org/10.3390/
Rs61111013.
ಸೈಯದಾ, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. ಕೃಷಿಯಲ್ಲಿ ಇಮೇಜ್ ಪ್ರೊಸೆಸಿಂಗ್, UAV ಮತ್ತು AI ಅನ್ನು ಬಳಸಿಕೊಂಡು ಮುಂಗಡ ನಿಯಂತ್ರಣ ತಂತ್ರಗಳು: ಒಂದು ವಿಮರ್ಶೆ. ವಿಶ್ವ J. ಇಂಜಿನ್. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
ತಹೈ, ಎ., ರಿಗ್ಸ್ಬಿ, ಜೆಟಿ, 1998. ಲೆಕ್ಕಪತ್ರದಲ್ಲಿ ಜರ್ನಲ್ ಪ್ರಭಾವವನ್ನು ತನಿಖೆ ಮಾಡಲು ಉಲ್ಲೇಖಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಮಾಹಿತಿ ಪ್ರಕ್ರಿಯೆ. Inf. ಪ್ರಕ್ರಿಯೆ. ನಿರ್ವಹಿಸು. 34 (2–3), 341–359.
ಟ್ಯಾಂಗ್, ವೈ., ದನಂಜಯನ್, ಎಸ್., ಹೌ, ಸಿ., ಗುವೋ, ಕ್ಯೂ., ಲುವೋ, ಎಸ್., ಹೆ, ವೈ., 2021. 5G ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಸಮೀಕ್ಷೆ ಮತ್ತು ಕೃಷಿಯ ಮೇಲೆ ಅದರ ಪ್ರಭಾವ: ಸವಾಲುಗಳು ಮತ್ತು ಅವಕಾಶಗಳು. ಕಂಪ್ಯೂಟ್.
ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
ತಾಂತಲಾಕಿ, ಎನ್., ಸೌರವ್ಲಾಸ್, ಎಸ್., ರೂಮೆಲಿಯೊಟಿಸ್, ಎಂ., 2019. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಡೇಟಾ-ಚಾಲಿತ ನಿರ್ಧಾರ ತೆಗೆದುಕೊಳ್ಳುವಿಕೆ: ಕೃಷಿ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ದೊಡ್ಡ ಡೇಟಾದ ಏರಿಕೆ. ಜೆ. ಅಗ್ರಿಕ್ ಆಹಾರ ಮಾಹಿತಿ.
20 (4), 344-380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. UAV- ಬಳಸಿಕೊಂಡು ಚಳಿಗಾಲದ ಗೋಧಿಯ ಇಳುವರಿ ಮತ್ತು ಸಸ್ಯದ ಎತ್ತರದ ಅಂದಾಜು ಆಧಾರಿತ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಚಿತ್ರಗಳು.
ಸಂವೇದಕಗಳು 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. ಎರಡು ಸ್ವಾಯತ್ತ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಕಡಿಮೆ ವಾತಾವರಣದಲ್ಲಿ ಸಸ್ಯ ರೋಗಕಾರಕದ ಸಂಘಟಿತ ಏರೋಬಯಾಲಾಜಿಕಲ್ ಮಾದರಿ. J. ಫೀಲ್ಡ್ ರಾಬ್. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. ಆಳವಾದ ಕಲಿಕೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಸೋಯಾಬೀನ್ ಕೀಟಗಳ ಪತ್ತೆ ಮತ್ತು ವರ್ಗೀಕರಣ
UAV ಚಿತ್ರಗಳೊಂದಿಗೆ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. ದಿ ಯೂಸ್ ಆಫ್ UAS ಫಾರ್ ಅಸೆಸ್ಸಿಂಗ್ ಅಗ್ರಿಕಲ್ಚರಲ್ ಸಿಸ್ಟಮ್ಸ್ ಇನ್ AN ವೆಟ್ಲ್ಯಾಂಡ್ ಇನ್ ಟಾಂಜಾನಿಯಾ ಇನ್ ದಿ- ಮತ್ತು ಸುಸ್ಥಿರ ಕೃಷಿಗಾಗಿ ವೆಟ್ಸೀಸನ್ ಮತ್ತು ಟೆರ್ರಾ-ಸಾರ್ ಎಕ್ಸ್ ಡೇಟಾಕ್ಕಾಗಿ ನೆಲದ ಸತ್ಯವನ್ನು ಒದಗಿಸುವುದು. ಇನ್: ISPRS - ಇಂಟರ್ನ್ಯಾಷನಲ್ ಆರ್ಕೈವ್ಸ್ ಆಫ್ ದಿ ಫೋಟೋಗ್ರಾಮೆಟ್ರಿ, ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು ಸ್ಪೇಷಿಯಲ್ ಇನ್ಫರ್ಮೇಷನ್ ಸೈನ್ಸಸ್, ಪುಟಗಳು 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
ಥೆಲ್ವಾಲ್, ಎಂ., 2008. ವೆಬ್ಮೆಟ್ರಿಕ್ಸ್ಗೆ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ಸ್. J. ಮಾಹಿತಿ ವಿಜ್ಞಾನ 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. UAV ಚಿತ್ರಗಳಲ್ಲಿ ಅತ್ಯುತ್ತಮ ಮಿತಿಗಾಗಿ ಸ್ವಯಂಚಾಲಿತ ವಸ್ತು-ಆಧಾರಿತ ವಿಧಾನ: ಮೂಲಿಕೆಯ ಬೆಳೆಗಳಲ್ಲಿ ಸಸ್ಯವರ್ಗದ ಪತ್ತೆಗಾಗಿ ಅಪ್ಲಿಕೇಶನ್. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. ಹೈ-ಥ್ರೂಪುಟ್ 3-D ಮಾನಿಟರಿಂಗ್ ಆಫ್ ಅಗ್ರಿಕಲ್ಚರ್-ಟ್ರೀ ಪ್ಲಾಂಟೇಶನ್ಸ್ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ತಂತ್ರಜ್ಞಾನ. PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, F., 2014. UAV ಯಿಂದ ಚಿತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಆರಂಭಿಕ-ಋತುವಿನ ಗೋಧಿ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಸಸ್ಯವರ್ಗದ ಭಾಗದ ಬಹು-ತಾತ್ಕಾಲಿಕ ಮ್ಯಾಪಿಂಗ್. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ UAV ಆಧಾರಿತ ಅಪ್ಲಿಕೇಶನ್ಗಳ ವಿಮರ್ಶೆ. ಮಾಹಿತಿ (ಸ್ವಿಟ್ಜರ್ಲೆಂಡ್) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. ತೋಟಗಾರಿಕಾ ಮರದ ಬೆಳೆ ರಚನೆಯನ್ನು ಅಳೆಯಲು ಡ್ರೋನ್ ಹಾರಾಟದ ಯೋಜನೆಯನ್ನು ಉತ್ತಮಗೊಳಿಸುವುದು. ISPRS J. ಫೋಟೋಗ್ರಾಮ್.
ರಿಮೋಟ್ ಸೆನ್ಸ್. 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. ಕೃಷಿ, ಇತ್ತೀಚಿನ ಪ್ರಗತಿಗಳು ಮತ್ತು ಭವಿಷ್ಯದ ಸವಾಲುಗಳಲ್ಲಿ ಇಂಟರ್ನೆಟ್ ಆಫ್ ಥಿಂಗ್ಸ್. ಬಯೋಸಿಸ್ಟ್. ಇಂಜಿನ್. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
ಉದ್ದೀನ್, A., ಸಿಂಗ್, VK, ಪಿಂಟೊ, D., Olmos, I., 2015. ಮೆಕ್ಸಿಕೋದಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ ವಿಜ್ಞಾನ ಸಂಶೋಧನೆಯ ಸೈಂಟೊಮೆಟ್ರಿಕ್ ಮ್ಯಾಪಿಂಗ್. ಸೈಂಟೊಮೆಟ್ರಿಕ್ಸ್ 105 (1), 97–114.
UN., 2019. ವಿಶ್ವ ಜನಸಂಖ್ಯೆಯ ನಿರೀಕ್ಷೆಗಳು 2019. https://population.un.org/wpp/ (15/04/2022 ರಂದು ಪ್ರವೇಶಿಸಲಾಗಿದೆ).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. UAV ಮೌಂಟೆಡ್ ಮಿನಿಯೇಚರ್ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸೆನ್ಸಾರ್ ಸಿಸ್ಟಮ್ನಿಂದ ಭತ್ತದ ಗದ್ದೆಗಳ ಗುಣಲಕ್ಷಣ. IEEE J. ಸೆಲ್. ಟಾಪ್. ಅಪ್ಲಿಕೇಶನ್ ಭೂಮಿಯ ಒಬ್ಸ್.
ರಿಮೋಟ್ ಸೆನ್ಸ್. 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. ವ್ಯಾನ್ ಡೆರ್ ಮೆರ್ವೆ, ಡಿ., ಬರ್ಚ್ಫೀಲ್ಡ್, ಡಿಆರ್, ವಿಟ್, ಟಿಡಿ, ಪ್ರೈಸ್, ಕೆಪಿ, ಶಾರದಾ, ಎ., 2020. ಡ್ರೋನ್ಸ್ ಇನ್
ಕೃಷಿ. ಅಡ್ವ. ಅಗ್ರೋನ್. 162, 1–30.
ವೇಲುಸಾಮಿ, ಪಿ., ರಾಜೇಂದ್ರನ್, ಎಸ್., ಮಹೇಂದ್ರನ್, ಆರ್ಕೆ, ನಾಸೀರ್, ಎಸ್., ಶಫೀಕ್, ಎಂ., ಚೋಯ್, ಜೆ.-ಜಿ., 2022.
ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳು (UAV): ಅಪ್ಲಿಕೇಶನ್ಗಳು ಮತ್ತು ಸವಾಲುಗಳು. ಶಕ್ತಿಗಳು 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. ಮಾನವರಹಿತ ವೈಮಾನಿಕವನ್ನು ಬಳಸಿಕೊಂಡು ಪರಿಸರ ಸೂಕ್ಷ್ಮ ಸಮುದ್ರ ಆವಾಸಸ್ಥಾನಗಳ ಮ್ಯಾಪಿಂಗ್ ಮತ್ತು ವರ್ಗೀಕರಣ
ವಾಹನ (UAV) ಚಿತ್ರಣ ಮತ್ತು ವಸ್ತು ಆಧಾರಿತ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ (OBIA). ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch'eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. ಗೋಧಿ ಮತ್ತು ರಾಪ್ಸೀಡ್ ಬೆಳೆಗಳ ಮೇಲೆ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಯಿಂದ ಹಸಿರು ಪ್ರದೇಶ ಸೂಚ್ಯಂಕ . ರಿಮೋಟ್ ಸೆನ್ಸ್. ಪರಿಸರ. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. ಹುಲ್ಲುಗಾವಲಿನ ಮೇಲೆ ನಾಲ್ಕು ಆಪ್ಟಿಕಲ್ UAV ಆಧಾರಿತ ಸಂವೇದಕಗಳನ್ನು ನಿಯೋಜಿಸುವುದು: ಸವಾಲುಗಳು ಮತ್ತು
ಮಿತಿಗಳು. ಬಯೋಜಿಯೋಸೈನ್ಸ್ 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
ವುರಾನ್, ಎಂಸಿ, ಸಲಾಮ್, ಎ., ವಾಂಗ್, ಆರ್., ಇರ್ಮಾಕ್, ಎಸ್., 2018. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಭೂಗತ ವಸ್ತುಗಳ ಇಂಟರ್ನೆಟ್: ವಾಸ್ತುಶಿಲ್ಪ ಮತ್ತು ತಂತ್ರಜ್ಞಾನದ ಅಂಶಗಳು. ತಾತ್ಕಾಲಿಕ ನೆಟ್ವರ್ಕ್. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. ಡಿಜಿಟಲ್ ಆರೋಗ್ಯಕ್ಕಾಗಿ ರಹಸ್ಯ ಘಟಕಾಂಶವಾಗಿ ಜವಾಬ್ದಾರಿಯುತ ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆ: ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆ, ಒಳನೋಟಗಳು ಮತ್ತು ಸಂಶೋಧನಾ ನಿರ್ದೇಶನಗಳು.
ಮಾಹಿತಿ. ಸಿಸ್ಟ್. ಮುಂಭಾಗ. 1–16.
ವಾಂಗ್, ಎಲ್., ಝಾಂಗ್, ಜಿ., ವಾಂಗ್, ಝಡ್., ಲಿಯು, ಜೆ., ಶಾಂಗ್, ಜೆ., ಲಿಯಾಂಗ್, ಎಲ್., 2019. ಬೆಳೆ ಬೆಳವಣಿಗೆಯ ಮೇಲ್ವಿಚಾರಣೆಯಲ್ಲಿ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಸಂಶೋಧನಾ ಪ್ರವೃತ್ತಿಯ ಬೈಬ್ಲಿಯೊಮೆಟ್ರಿಕ್ ವಿಶ್ಲೇಷಣೆ: ಚೀನಾದಲ್ಲಿ ಕೇಸ್ ಸ್ಟಡಿ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (7). https://doi.org/10.3390/rs11070809.
ವೈಟ್, ಎಚ್ಡಿ, ಗ್ರಿಫಿತ್, BC, 1981. ಲೇಖಕರ ಸಹಕಾರ: ಬೌದ್ಧಿಕ ರಚನೆಯ ಸಾಹಿತ್ಯದ ಅಳತೆ. ಜಾಮ್. Soc. ಮಾಹಿತಿ. ವಿಜ್ಞಾನ 32 (3), 163–171.
Xiang, H., Tian, L., 2011. ಸ್ವಾಯತ್ತ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ (UAV) ಆಧಾರಿತ ಕಡಿಮೆ-ವೆಚ್ಚದ ಕೃಷಿ ದೂರ ಸಂವೇದಿ ವ್ಯವಸ್ಥೆಯ ಅಭಿವೃದ್ಧಿ. ಬಯೋಸಿಸ್ಟ್. ಇಂಜಿನ್. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. UAV ಆಧಾರಿತ ಸಂವೇದಕಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಸಸ್ಯದ ಹೈ-ಥ್ರೋಪುಟ್ ಫಿನೋಟೈಪಿಂಗ್ ಗುಣಲಕ್ಷಣಗಳ ಕುರಿತು ವಿಮರ್ಶೆ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಅಪ್ಲಿಕೇಶನ್ಗಳಿಗಾಗಿ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನ-ಒಂದು ವಿಮರ್ಶೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (12). https://doi.org/10.3390/
Rs11121443.
Yeom, S., 2021. ಮಲ್ಟಿರೋಟರ್ ಮೂಲಕ ಅತಿಗೆಂಪು ಥರ್ಮಲ್ ಇಮೇಜಿಂಗ್ನೊಂದಿಗೆ ಜನರನ್ನು ಟ್ರ್ಯಾಕಿಂಗ್ ಮತ್ತು ತಪ್ಪು ಟ್ರ್ಯಾಕ್ ತೆಗೆಯುವಿಕೆ. ಡ್ರೋನ್ಸ್ 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. ಚಿತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಬೆಳೆ ನಿಯತಾಂಕಗಳ ಅಂದಾಜು ಹೋಲಿಕೆ UAV-ಮೌಂಟೆಡ್ ನಿಂದ
ಸ್ನ್ಯಾಪ್ಶಾಟ್ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸೆನ್ಸಾರ್ ಮತ್ತು ಹೈ-ಡೆಫಿನಿಷನ್ ಡಿಜಿಟಲ್ ಕ್ಯಾಮೆರಾ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನವನ್ನು ಬಳಸಿಕೊಂಡು ಚಳಿಗಾಲದ ಗೋಧಿ ಮೇಲಿನ ನೆಲದ ಜೀವರಾಶಿಯ ಅಂದಾಜು- ಆಧಾರಿತ ಸ್ನ್ಯಾಪ್ಶಾಟ್
ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಸಂವೇದಕ ಮತ್ತು ಬೆಳೆ ಎತ್ತರದ ಸುಧಾರಿತ ಮಾದರಿಗಳು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. ಉಷ್ಣವಲಯದ ಅರಣ್ಯ ಚೇತರಿಕೆ ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು ಹಗುರವಾದ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವಾಹನಗಳನ್ನು ಬಳಸುವುದು. ಬಯೋಲ್.
ಸಂರಕ್ಷಿಸಿ. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. ಝಮೊರಾ-ಇಜ್ಕ್ವಿರ್ಡೊ, ಎಮ್ಎ, ಸಾಂಟಾ, ಜೆ., ಮಾರ್ಟಿನೆಜ್, ಜೆಎ, ಮಾರ್ಟಿನೆಜ್, ವಿ., ಸ್ಕರ್ಮೆಟಾ, ಎಎಫ್, 2019.
ಎಡ್ಜ್ ಮತ್ತು ಕ್ಲೌಡ್ ಕಂಪ್ಯೂಟಿಂಗ್ ಆಧಾರಿತ ಸ್ಮಾರ್ಟ್ ಫಾರ್ಮಿಂಗ್ IoT ಪ್ಲಾಟ್ಫಾರ್ಮ್. ಬಯೋಸಿಸ್ಟ್. ಇಂಜಿನ್. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. ಮಾನವರಹಿತ ವೈಮಾನಿಕದಿಂದ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡಿರುವ ಅತ್ಯಂತ ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಚಿತ್ರಣವನ್ನು ಬಳಸಿಕೊಂಡು ಮರದ ಎತ್ತರದ ಪ್ರಮಾಣೀಕರಣ
ವಾಹನ (UAV) ಮತ್ತು ಸ್ವಯಂಚಾಲಿತ 3D ಫೋಟೋ-ಪುನರ್ನಿರ್ಮಾಣ ವಿಧಾನಗಳು. ಯುರ್. ಜೆ. ಅಗ್ರೋನ್. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
ಜಾಂಗ್, ಸಿ., ಕ್ರೇನ್, ಡಬ್ಲ್ಯೂಎ, ಮೆಕ್ಗೀ, ಆರ್ಜೆ, ವಂಡೆಮಾರ್ಕ್, ಜಿಜೆ, ಡೇವಿಸ್, ಜೆಬಿ, ಬ್ರೌನ್, ಜೆ., ಹಲ್ಬರ್ಟ್, ಎಸ್ಎಚ್, ಶಂಕರನ್, ಎಸ್., 2020. ತಂಪಾದ ಋತುವಿನ ಬೆಳೆಗಳಲ್ಲಿ ಹೂಬಿಡುವ ತೀವ್ರತೆಯ ಚಿತ್ರ-ಆಧಾರಿತ ಫಿನೋಟೈಪಿಂಗ್. ಸಂವೇದಕಗಳು 20 (5), 1450. https://doi.org/10.3390/s20051450.
ಜಾಂಗ್, ಸಿ., ಕೊವಾಕ್ಸ್, ಜೆಎಂ, 2012. ನಿಖರವಾದ ಕೃಷಿಗಾಗಿ ಸಣ್ಣ ಮಾನವರಹಿತ ವೈಮಾನಿಕ ವ್ಯವಸ್ಥೆಗಳ ಅಪ್ಲಿಕೇಶನ್: ಒಂದು ವಿಮರ್ಶೆ. ನಿಖರ. ಕೃಷಿ. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
ಜಾಂಗ್, ಎಲ್., ಝಾಂಗ್, ಎಚ್., ನಿಯು, ವೈ., ಹಾನ್, ಡಬ್ಲ್ಯೂ., 2019. UAV ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಆಧಾರದ ಮೇಲೆ ಮೆಕ್ಕೆ ಜೋಳದ ನೀರಿನ ಒತ್ತಡವನ್ನು ಮ್ಯಾಪಿಂಗ್ ಮಾಡುವುದು. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (6), 605.
ಝಾಂಗ್, ಎಕ್ಸ್., ಹಾನ್, ಎಲ್., ಡಾಂಗ್, ವೈ., ಶಿ, ವೈ., ಹುವಾಂಗ್, ಡಬ್ಲ್ಯೂ., ಹಾನ್, ಎಲ್., ಗೊಂಝ್ ಅಲೆಜ್-ಮೊರೆನೊ, ಪಿ., ಮಾ, ಹೆಚ್., ಯೆ, ಎಚ್., ಸೊಬೀಹ್ , ಟಿ., 2019. ಸ್ವಯಂಚಾಲಿತ ಹಳದಿ ತುಕ್ಕುಗಾಗಿ ಆಳವಾದ ಕಲಿಕೆ ಆಧಾರಿತ ವಿಧಾನ
ಹೆಚ್ಚಿನ ರೆಸಲ್ಯೂಶನ್ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ UAV ಚಿತ್ರಗಳಿಂದ ರೋಗ ಪತ್ತೆ. ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ 11 (13), 1554.
ಝಾವೋ, ಎಕ್ಸ್., ಝಾಂಗ್, ಜೆ., ಹುವಾಂಗ್, ವೈ., ಟಿಯಾನ್, ವೈ., ಯುವಾನ್, ಎಲ್., 2022. ವೇವ್ಲೆಟ್ ವಿಶ್ಲೇಷಣೆಯೊಂದಿಗೆ ಹೈಪರ್ಸ್ಪೆಕ್ಟ್ರಲ್ ಇಮೇಜಿಂಗ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಚಹಾ ಸಸ್ಯಗಳ ರೋಗ ಮತ್ತು ಕೀಟಗಳ ಒತ್ತಡದ ಪತ್ತೆ ಮತ್ತು ತಾರತಮ್ಯ. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. ಏರಿಯಲ್ ಇಮೇಜ್ ಸೆಮ್ಯಾಂಟಿಕ್ ಸೆಗ್ಮೆಂಟೇಶನ್ಗಾಗಿ ಎಂಟ್ರೊಪಿ ಮಾರ್ಗದರ್ಶಿ ವಿರೋಧಿ ಡೊಮೇನ್ ಅಡಾಪ್ಟೇಶನ್. IEEE ಟ್ರಾನ್ಸ್. ಜಿ
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. ಭೂ-ಆಧಾರಿತ ಸ್ಪೆಕ್ಟ್ರಲ್ನ ಸಮಯ ಸರಣಿ ವಿಶ್ಲೇಷಣೆಯ ಮೂಲಕ ಅಕ್ಕಿ ಫಿನಾಲಾಜಿಯ ಪತ್ತೆ ಸೂಚ್ಯಂಕ ಡೇಟಾ. ಕ್ಷೇತ್ರ ಬೆಳೆಗಳು ರೆ. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
ಝೆಂಗ್, ಜೆ., ಯಾಂಗ್, ಡಬ್ಲ್ಯೂ., 2018. ವೈರ್ಲೆಸ್ ಸೆನ್ಸರ್ಗಳ ಆಧಾರದ ಮೇಲೆ ನಿಖರವಾದ ಕೃಷಿ ಸೋರಿಕೆ ಬಿತ್ತನೆ ವ್ಯವಸ್ಥೆಯ ವಿನ್ಯಾಸ. ಇಂಟ್ ಜೆ. ಆನ್ಲೈನ್ ಎಂಜಿ. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. UAV-LiDAR ಡೇಟಾವನ್ನು ಬಳಸಿಕೊಂಡು ಮೆಕ್ಕೆ ಜೋಳದ ಸಸ್ಯ ಎತ್ತರ ಬದಲಾವಣೆಗಳ ವಿಶ್ಲೇಷಣೆ. ಕೃಷಿ 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
ಝೌ, ಎಸ್., ಚಾಯ್, ಎಕ್ಸ್., ಯಾಂಗ್, ಝಡ್., ವಾಂಗ್, ಎಚ್., ಯಾಂಗ್, ಸಿ., ಸನ್, ಟಿ., 2021. ಮೆಕ್ಕೆಜೋಳ-ಐಎಎಸ್: ಹೈ-ಥ್ರೂಪುಟ್ ಪ್ಲಾಂಟ್ ಫಿನೋಟೈಪಿಂಗ್ಗಾಗಿ ಆಳವಾದ ಕಲಿಕೆಯನ್ನು ಬಳಸುವ ಮೆಕ್ಕೆ ಜೋಳದ ಚಿತ್ರ ವಿಶ್ಲೇಷಣೆ ಸಾಫ್ಟ್ವೇರ್ . ಸಸ್ಯ ವಿಧಾನಗಳು 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. ಧಾನ್ಯದ ಇಳುವರಿಯನ್ನು ಊಹಿಸುವುದು ಬಹು-ತಾತ್ಕಾಲಿಕ ಸಸ್ಯವರ್ಗವನ್ನು ಬಳಸಿಕೊಂಡು ಅಕ್ಕಿ
UAV ಆಧಾರಿತ ಮಲ್ಟಿಸ್ಪೆಕ್ಟ್ರಲ್ ಮತ್ತು ಡಿಜಿಟಲ್ ಚಿತ್ರಣದಿಂದ ಸೂಚ್ಯಂಕಗಳು. ISPRS J. ಫೋಟೋಗ್ರಾಮ್. ರಿಮೋಟ್ ಸೆನ್ಸ್. 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. ವೈರ್ಲೆಸ್ ಸೆನ್ಸಾರ್ ನೆಟ್ವರ್ಕ್ ಆಧಾರಿತ ಹಸಿರುಮನೆ ಮಾನಿಟರಿಂಗ್ ಸಿಸ್ಟಮ್ನ ಕೋರ್ ತಂತ್ರಜ್ಞಾನದ ಸಿಮ್ಯುಲೇಶನ್. ಇಂಟ್ ಜೆ. ಆನ್ಲೈನ್ ಎಂಜಿ. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. ನಿಖರವಾದ ಕೃಷಿಯಲ್ಲಿ ಅತಿಗೆಂಪು ಉಷ್ಣ ಚಿತ್ರಣದೊಂದಿಗೆ ಬೆಳೆ ನೀರಿನ ಒತ್ತಡದ ಮೌಲ್ಯಮಾಪನ: ಒಂದು ವಿಮರ್ಶೆ
ಮತ್ತು ಆಳವಾದ ಕಲಿಕೆಯ ಅನ್ವಯಗಳಿಗೆ ಭವಿಷ್ಯದ ನಿರೀಕ್ಷೆಗಳು. ಕಂಪ್ಯೂಟ್. ಎಲೆಕ್ಟ್ರಾನ್. ಕೃಷಿ. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}